Internal sensors
Internal sensors. Josep Amat and Alícia Casals Automatic Control and Computer Engineering Department . Program. Chapter 1. Introduction Chapter 2. Robot Morphology Chapter 3. Control Chapter 4. Robot programming Chapter 5. Perception

Internal sensors
E N D
Presentation Transcript
Internal sensors Josep Amat and Alícia Casals Automatic Control and Computer Engineering Department
Program Chapter 1. Introduction Chapter 2. Robot Morphology Chapter 3. Control Chapter 4. Robot programming Chapter 5. Perception Chapter 6. Mobile robots. Architecture, components and characteristics Chapter 7. Robotics applications. Robotization
Chapter 2. Robot Morphology 2.1 – Mechanical Structures. Classical Architectures. 2.2 – Characteristics of a Manipulator. Definitions. 2.3 - Actuators. Pneumatic, Hydraulic and Electrical. 2.4 – Movement transmission systems: Gearboxes, movement transmission and conversion. 2.5 – Robot internal sensors. Position sensors, speed and acceleration. 2.6 – End Effectors.
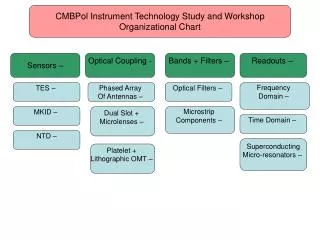
Components of a Robot External Sensors Environment Programming Net Internal Sensors Control Unit Actuators Mechanical Structure User
Detectors Position sensors Mechanical: Internal sensors Actuators Mechanical structure
Electromagnetic: Detection from the variations of the oscillation conditions of an L – C sensor circuit Detectors Internal sensors Position sensors Actuators Mechanical structure
Detectors Position sensors Optical: From the interruption of a light beam, or reflection. Internal sensors Actuators Mechanical structure
Types of sensors Angular Linear
Digital Vcc R1 V = Vcc R R R2 a R a R1 V = Vcc = Vcc a a0 a0R 0 V Types of sensors Resistive (Potentiometers) Angular Analog
Ve = A sin (wt) Ve = A sin(wt ) cos a Ve = A sin(wt ) sin a Types of sensors Resistive (Potenciometers) Angular Inductive ( Resolver ) Analog Digital A is obtained through the lecture in a look up table of arcsin and arccos
Low resolution conversions S1 = V cos a a aX A/D A/D D/A a S2 = V sin a High resolution conversions mcontroler aX e A S1 S2 Ve = V sin (wt) S1 = V sin(wt ) cos a S2 = V sin(wt ) sin a Possibility of obtaining the value of a by means of “tracking”
Resistive (Potentiometers) Angular Inductive ( Resolver ) Absolute Incremental Analog Digital Types of sensors
Optical Encoder Absolute Fotoelectric sensor n paths 2n divisions n optical barriers 2 paths 4 divisions
Ambiguity when reading the natural binary code Commercially 10 bits 1024 div. Resol. 0.35º 12 bits 4096 div. Resol. 0.088º 14 bits 16384 div. Resol. 0.022º Encoder diameters: de 50 a 175 mm Elimination of the reading ambiguity using the Gray code
Example of a disc with the Gray code Example of an angular encoder
Types of Sensors Resistive (Potentiometers) Angular Inductive ( Resolver ) Absolute Incremental Analog Digital
Commercially 10 bits 1024 div. Resol. 0.35º 12 bits 4096 div. Resol. 0.088º 14 bits 16384 div. Resol. 0.022º Signal obtained after displacing the sensor over a coded disc 1 2 3 4 5 6 7 8 9 10 11 12 Gray code
Commercially 10 bits 1024 div. Resol. 0.35º 12 bits 4096 div. Resol. 0.088º 14 bits 16384 div. Resol. 0.022º Gray code Possibility of detecting the counting sense using two sensors
Incremental Optical Encoder A B R 1 mark = 4divisions
0 1 200 x 4 = 800 P Q Q P
r 120 cm. 60 60 j = 60º 360 360 q = 210 l = 2 p 1200 l = 1256 mm. 1256 mm. r = 170,6 Computing resolution = = q = 170,6 Using a a 10 bits encoder directly coupled to the motor axis = 7,3 mm. js
Measuring strategies 1 : 1 0 j Arm 0 360º 0 j Encoder Absolute Code j dn-1 . . . . do dn-1 . . . . do Incremental Counter
Arm 360º j n = Absolute Code j dn-1 . . . . do dn-1 . . . . do Incremental Counter Measuring strategies 1 : n 0 j 0 360º Encoder
Arm 360º n = m j m · · · m = 2 m = 1 Code j Absolute + Inc. dn+p-1 . . dn-1 · · · · do dn+p-1 . . dn-1 · · · ·do Counter Incremental Measuring strategies 1 : n 0 j Encoder 0 360º 0 360º Encoder coupledto the arm with atransmissionratio: m x n
r 120 cm. j = 60º l = 1256 mm. 1256 mm. r = x 6 x 8 8192 Computing resolution q = 8 · 210 = q = 8192 = 0,15 mm. Using a 10 bits encoder coupled with a 1:64 transmission ratio
l = 1256 mm. 1256 mm. r = 204.800 0 1 2 3 · · · 199 200 With a 10 bits A/D converter r’ = r/1024 200 x 1024 = 204.800 = 0,006 mm. Sinusoidal light obtained from Moore interference r < 0,01 mm.
Types of sensors Resistive (Potentiometers) Angular Inductive ( Resolver ) Incremental Absolute Analog Digital Resistive Inductive ( Inductosyn ) Linear LVDT Optical rule Analog Digital
R Sensing with a linear potentiometer
Types of sensors Resistive (Potentiometers) Angular Inductive ( Resolver ) Incremental Absolute Analog Digital R Resistive Inductive ( Inductosyn ) Linear LVDT Optical rule Analog Digital
0,2 mm Inductosyn sensor With two secondary sensors shifted 90º, the resolution is: 0,2 / 28 < 0.001 mm * * With an analog interpolation using a 8 bits ADC
Resistive (Potentiometers) Angular Inductive ( Resolver ) Incremental Absolute Analog Digital Resistive Inductive ( Inductosyn ) Linear LVDT Optical rule Analog Digital Types of sensors
LVDT LVDT = Linear Voltage Differential Transformed) Linear sensing displacements
LVDT V1 v V2 V1 V2 V1- V2 Linear sensing displacements
Analog Digital Analog Digital Types of sensors Resistive (Potentiometers) Angular Inductive ( Resolver ) Incremental Absolute Resistive Inductive ( Inductosyn ) Linear LVDT Optical rule
Incremental optical rule Head reader Absolute optical rule