Download
1 / 13
130 likes | 214 Views
Learn the benefits of utilizing pressure sensor inputs for rotary blood pumps in enhancing patient monitoring and increasing quality of life. Explore control algorithm development, diagnostic functions, and hardware considerations detailed in this informative study.

E N D
Physiologic Control Algorithms for Rotary Blood Pumps using Pressure Sensor Input Edward Bullister, Ph.D. Sanford Reich, Ph.D. APEX Medical, Inc. ISRP 2001 18 August 2001
Why Use Pressure Inputs? • Provides physiologic feedback for pump control. • Provides added-value pump diagnostic and monitoring functions. • Increases capability for patient monitoring. • Potentially increases patient quality of life.
How to Implement? • Control Algorithm Development • Design Strategy to Mimic Patients’ Physiologic Control • Control Algorithm Schematic • Control Algorithm Detail • Control Algorithm Results • Added-Value Diagnostic and Monitoring Functions • Patient Monitoring • Hardware Considerations • Summary
Level 1: Basic Control Algorithm • Level 1 Control Input: LVDFP - Left Ventricular Diastolic “Filling Pressure” • Level 1 Control Output: Pump Flow Rate • Proportional Integral Control Algorithm d/dt(Flow) = K * (LVDFP - Pdesired) K = 0.1 L/min/mmHg • Flow Pressure • Simple • Robust
Level 2: Exercise Control Algorithm • Level 2 Control Inputs: • Arterial Pressure • Pulse Rate Increase (e.g., during exercise) • Level 2 Control Output: • Desired LVDFP • Level 2 Limits: • Max/min LVDFP • Max/min Arterial Pressure
Flow Rate Monitor using Pressure • Pressure Calculated from Pump Speed and Pressure Difference • Independent of Motor Current • Includes High Frequency Content Flow meter Measurement Flow (L/min) Calculated From Pressure Time (sec)
Hydraulic Power Monitor • Hydraulic Power (HP) into Blood • Pump: HPpump = Ppump * PumpFlow (continuous) • Heart: HPheart ~ Pheart * PumpFlow (measured during systole)
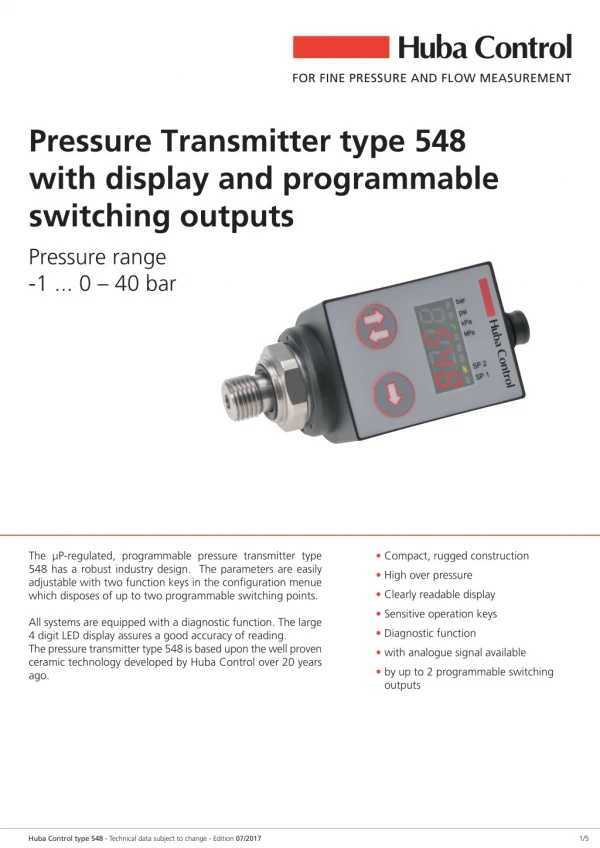
Hardware Considerations • Pressure Sensor Technology • Thin-Film Based • MEMS Based • Any Rotary VAD • Pressure Sensor Placement
Component Analysis Computational Fluid Dynamics (CFD) • Example - Inlet Cannula • Establish optimal location for pressure sensor • Calculate pressure coefficient K for nonlinear relationship: P = K*V2
Summary • An initial control algorithm has been implemented to auto-regulate rotary blood pumps using physiological pressure inputs. • Two levels of control for a rotary pump have been tested in a mock loop setup. • The pressure signals produce added-value information. • Additional monitoring and control levels have been conceived. • Goal is to contribute to patient quality of life.