
第 5 回 クラスを考える (1)
第 5 回 クラスを考える (1). 風船クラス (Balloon). 体を起す. SimpleRobot クラス. しゃがむ. リモコンクラス( Remcon クラス). ・途中に天井から障害物( Obstracle クラス) が垂れ下がっているので、それをしゃがんで避ける。 ・ロボットは「rb Go 進む」「 rbDown しゃがむ」「 rbUp 起す」「 rbBreak 風船を割る 」 というメソッドをもつ。 ・上記のメソッドは、各々呼び出されると、 「 1 歩進みました。障害物までxxxメートルです。風船までxxxメートルです。」

第 5 回 クラスを考える (1)
E N D
Presentation Transcript
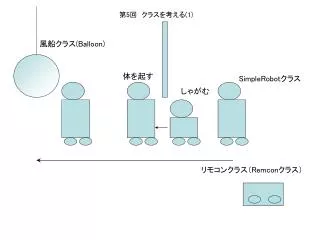
第5回 クラスを考える(1) 風船クラス(Balloon) 体を起す SimpleRobotクラス しゃがむ リモコンクラス(Remconクラス)
・途中に天井から障害物(Obstracle クラス)が垂れ下がっているので、それをしゃがんで避ける。 ・ロボットは「rbGo進む」「rbDownしゃがむ」「rbUp起す」「rbBreak風船を割る」というメソッドをもつ。 ・上記のメソッドは、各々呼び出されると、 「1歩進みました。障害物までxxxメートルです。風船までxxxメートルです。」 「しゃがみました。」 「体を起しました。」 「風船を割ります。」 というメッセージを出す。しゃがんだ状態でも前に進むことができる ・風船及び、障害物がスタート地点から何メートル先にあるかは、各々のメンバ変数の初期値で設定する。 第5回クラスを考える(2)
第5回 クラスの構成を考える Remconクラス SimpleRobotクラス クラス名: Remcon メンバ名: クラス名: SimpleBobot メンバ変数: name 風船の名前 move 歩いた歩数 numb 割った風船の数 メソッド名: main SimpleBobotのインスタンスを生成する Balloonのインスタンスを生成する 風船がすべて割れたら終了する。 コンストラクタ メソッド: Balloonクラス Obstracleクラス rbGo rbDown rbUp rbBreak 。。。 Balloon Obstracle クラス名: クラス名: メンバ変数: position 風船の位置 メンバ変数: position 障害物の位置 メソッド: balBreak (自身が)割れる getPosition 自分の位置を知らせる メソッド: getPosition 自分の位置を知らせる