Download
1 / 13
130 likes | 149 Views
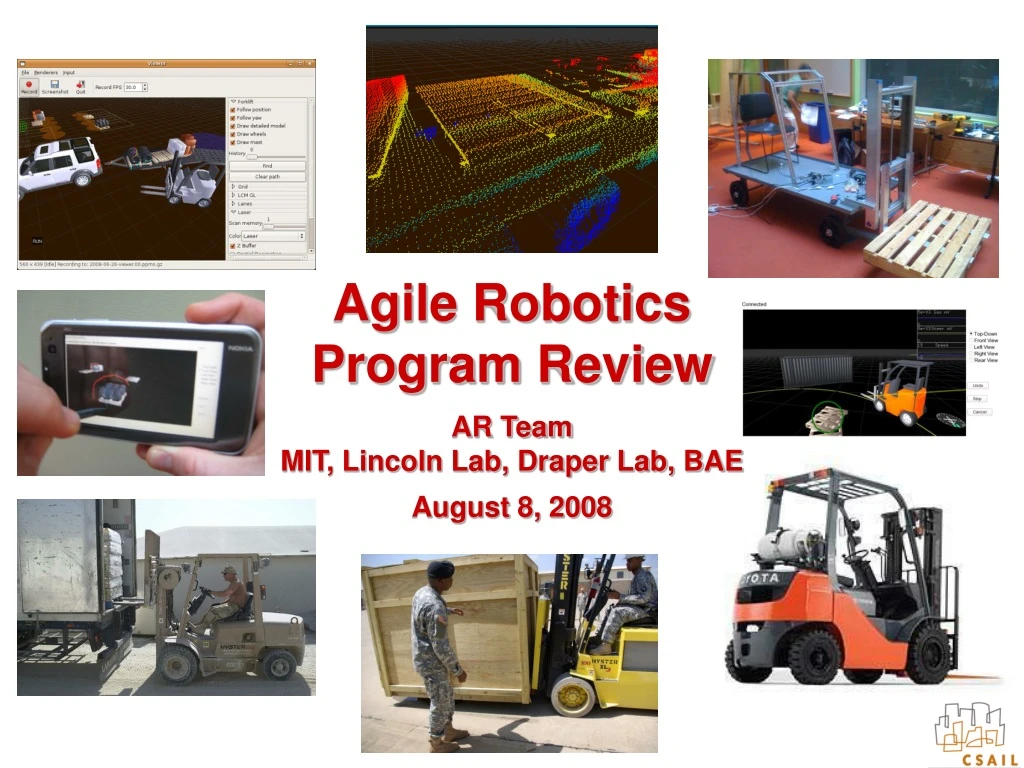
This document provides an overview of the Agile Robotics Program Review, including budget snapshot, platform costs, timeline and milestones, and directions for Year 2 and 3. It also highlights the progress made in developing the Drive-by-Wire Platform and Prototype Autonomous Capability. The discussion covers potential improvements in manipulation, reasoning, sensing, and scaling.

E N D
Agile Robotics Program ReviewAR TeamMIT, Lincoln Lab, Draper Lab, BAEAugust 8, 2008
Programmatics • Budget snapshot • Platform costs • Timeline and milestones • Year 2, 3 directions • Summary and discussion
Budget Snapshot Notes: 1) Major fabricated and non-fabricated equipment purchases planned for period after July 2008 delivery of prototype vehicle 2) Significant travel and shipping costs anticipated in February and March 2009 to support end-of-year prototype capability demonstration
Drive-by-Wire Platform Costs Notes: *A 3,000 lb. Yale forklift costs $50K; we chose a US-manufactured Toyota forklift for $25K All costs are estimated; procurement lead time approx. 12 weeks Costs exclude robotic arm(s) under consideration for future years
Working Timeline Requirements analysis, system & interface design, safety, user testing Jan Feb Mar Apr May Jun Jul Aug Sep Oct Nov Dec Jan Feb Mar Apr Visit to Visit to Visit to CASCOM Incursion Seamless Shouted Testing & LIA CASCOM Ft. Campbell Visit to MITdetection handoff warnings validation Simulation development Port DGC Speech Gesture Pallet Situational Whole-SSA codebaseintegration support detection awareness simulation Mockup forklift Drive-by-wire Sensor Planning Pallet prototyping placement and control engagement Full-scale prototype Drive-by-wire Sensor Planning Pallet Pallet Vehicle prototyping placement and control engagement mobility interaction (Rented forklift) (Purchased forklift) Capability migration Lincoln FMTV Laboratory studies Year 1 Demo Program Review KickoffMeeting Program Review Today Year 1 Y2 Preliminaries: Drive-by-Wire Platform Development Prototype AutonomousCapability Development
Sept. 2008 Milestones(= anticipated) • Capability 0.0: 30 Jun 08 • Analyze and summarize existing SSA operational practices • Demonstrate low-fidelity simulation of terrain, pallets, and trucks • Develop prototype speech, gesture interface to command forklift • Capability 0.1: 30 Sep 08 • Build a partially-actuated mockup forklift • Develop prototype sensing, planning, control algorithms • Demonstrate mockup working in a real-world scenario to identify, localize, select, engage, lift, transport, and place one pallet at a time as directed • Capability 0.2: 31 Dec 08 • Convert a stock manual forklift to drive-by-wire control • Team members complete required OSHA 1910.178 training • Understand forklift degrees of freedom, sensing, feedback and control • Develop functional interface, perception, planning, control algorithms • Interface: natural interaction, effective for cluttered real-world situations • Perception: multiple trucks and pallets, uneven terrain, other moving agents • Planning: summoning; pallet approach, engagement, transport and placement • Control: fast, accurate mobility and manipulation; robustness to uneven terrain • Capability 0.3: 31 Mar 09 • Prototype demonstration at venue to be determined (tentatively Ft. Belvoir)
Planned Year 2, 3 Directions • Fine-grain (sub-pallet) manipulation • Robot arms, pallet break-down, box manipulation • Integration with RFID,NSN, parts catalogs • Higher-level reasoning • E.g. moving blocking pallets aside to achieve goal • With supervisor direction, or fully autonomously • Higher-level direction (e.g., “put those pallets onto…”) Primaryfocus areas • Passive (video) sensing • Monocular or stereo • More CPU resources • Cheaper, less emission • Many forklifts,few supervisors • Human dispatcher,whole-SSA interface • Multi-task optimization Year 1Capability • Adverse environments • Mud, rain, snow, dust, sand-storms; at night • GPS-denied conditions (e.g., landmark-based navigation) • Whole-SSA transfer • Roll up onto many trucks • Roll out SSA as specified
Summary • Tackling problem along four fronts, in parallel: • Requirements analysis: LIA, CASCOM, Ft. Campbell • Simulation studies for sensing, dataflow, throughput • Mockup experiments, drive-by-wire elements • Full-scale prototype development, data collection • At present, substantially ahead of schedule • Several September, December milestones achieved • Demonstrated components in simulation, on mockup • (Partially) working full-scale prototype by fall 2008 • Anticipated fruitful directions for Years 2, 3 • Improved manipulation, reasoning, sensing, scaling
Program Management Discussion 0900 – 0930: Arrive MIT Kiva conference room (32G-449) 0930 – 0945: Informal introductions 0945 – 1030: Summary goals and status 1030 – 1045: Break, walk to demonstration venues 1045 – 1145: Demonstrations (Kiva, Holodeck, Hangar) 1200 – 1300: Lunch [Highlights of other MIT robotics] 1300 – 1415: Technical briefings (5 x 15 minutes) 1415 – 1430: Break 1430 – 1530: Technical briefings (4 x 15 minutes) 1530 – 1630: Feedback and discussion 1630: Main group adjourns 1630 – 1700: Program management discussion 1700: Program review adjourns
Program Review Adjourns • Travel safely!