Download

1 / 17
870 likes | 3.5k Views
ULTRASONIC SENSORS. Semih Öztürk Mechatronics Instructor : Associate Prof. İsmail Lazoğlu 26/05/2011. OUTLINE. Ultrasonic Sensors Characteristics Control Sample Schematic Applications Conclusion. Ultrasonic Sensors. Ultrasonic Sensors generate high frequency sound waves.

E N D
ULTRASONIC SENSORS Semih Öztürk Mechatronics Instructor: Associate Prof. İsmail Lazoğlu 26/05/2011
OUTLINE • Ultrasonic Sensors • Characteristics • Control • Sample Schematic • Applications • Conclusion
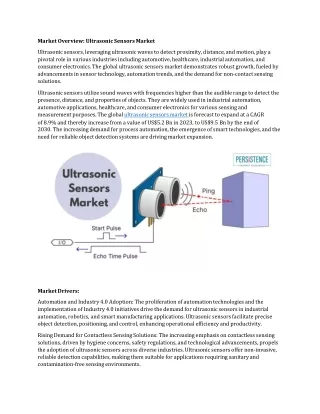
Ultrasonic Sensors • Ultrasonic Sensors generate high frequency sound waves. • Elavulate the echo • Time interval between sending the signal and reciving is calculated to determine the distance to an object.
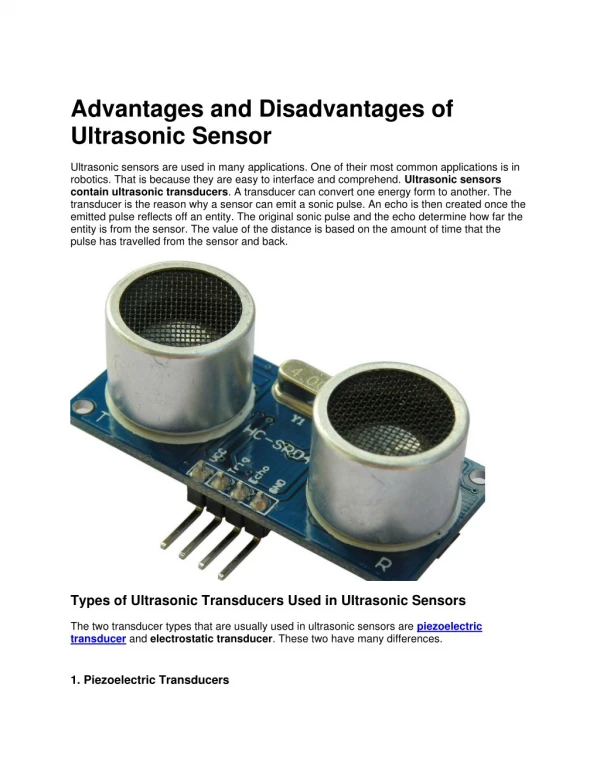
WORKING PRINCIPLE • Transducer: device that converts energy into ultrasound. • Dog wistle: mechanical energy -> ultrasonic sound waves in the form of air pressure. • Used in the training of dogs and cats • 16 – 22 kHz
Piezoelectric Transducers • Electrical energy Sound • Piezoelectric crystals: change size with voltage • Oscillation with applied AC (above 20kHz)
Characteristics of Ultrasound • Inaudible to humans • Sound pressure over 100dB = jet engine • High directivity • Due high frequency low energy level (kindey stone) • Compressional vibration of matter • Can be used to examine the characteristic of the matter (organ in a body) • Low propagation speed • 340m/s in the air. • Low speed signal processing.
Size and shape of the vibrating surface • Frequency at which the trancducer vibrates. • Narrower directivity • Higher frequency • Largesize • In electromagnetics, directivity is a figure of merit for an antenna. It measures the power density the antenna radiates in the direction of its strongest emission, versus the power density radiated by an ideal isotropic radiator (which emits uniformly in all directions) radiating the same total power. Directivity
Directivity Difference in detection distance with varying frequency
Prevent False Readings • Temperature • T ̴ • 0.6 m/sec change for 1 degree Celsius • Reflection • Echo • Liquids or solids with large and hard particles • Angle of reflection = Angle of incidence
Echo is more than 3 metersaway that has its reflective surface at a shallow angle so that sound will not be reflected back towardsthe sensor is too small to reflect enough sound back to the sensor.
Prevent False Readings • Propagation • Dispersion loss of intensity • Intensity of sound decreases with • Absorption • Fluff and loose dirt • In substance in which it travels( 1-3 dB decrease for 1 m of dry and dust free air)
Applications • Distance Measurement • Sensors with an on or off digital output are available for detecting the presence of objects • Sensors with an analog output which varies proportionally to the sensor to target separation distance • Ultrasonic Testing • Finding flaws in materials (nondestructive testing
Applications Ultrasound (In Medicine)
References • http://www.parallax.com/Store/Sensors/ObjectDetection/tabid/176/CategoryID/51/List/0/SortField/0/Level/a/ProductID/92/Default.aspx • Munenori Hikita. Murata's European products • Ultrasonic sensor. InWikipedia, The Free Encyclopedia. fromhttp://en.wikipedia.org/w/index.php?title=Ultrasonic_sensor&oldid=359643539