Scorpion
Scorpion. Autonomous Walking Robot. References. Dirk Spenneberg and Frank Kirchner, An Approach to Autonomous Outdoor Walking Robots. Dirk Spenneberg and Frank Kirchner, Omnidirectional Walking in an Eight Legged Robot. Bernhard Klaassen, Ralf Linnemann, Dirk Spenneberg, Frank


Scorpion
E N D
Presentation Transcript
Scorpion Autonomous Walking Robot
References Dirk Spenneberg and Frank Kirchner, An Approach to Autonomous Outdoor Walking Robots. Dirk Spenneberg and Frank Kirchner, Omnidirectional Walking in an Eight Legged Robot. Bernhard Klaassen, Ralf Linnemann, Dirk Spenneberg, Frank Kirchner. Biomimetic Walking Robot Scorpion: Control and Modeling. Preprint: to appear in Robotics and Autonomous Systems Journal. Ralf Linnemann, Bernhard Klaassen, and Frank Kirchner, Walking Robot Scorpion – Experiences with a full parametric model.
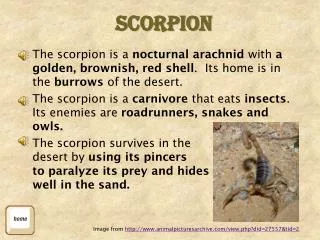
Robot Overview • 8 legged • About 65 cm long • 12.5 kg, with battery • Speed: 30 cm/sec • Autonomous
Operator • Wireless 28k baud • CCD with audio video link • Issues high level commands • Such as "walk forward", "left", "right", "go up", "go down", "move sideward", "turn"
Proprioceptive Sensors • Motor Encoders for each motor to measure the relative joint angle • Hall-Effect Motor Current Sensors for each motor • The analog load/pressure sensor in each the foot tip • The Power-Management sensors, providing current battery voltage and current power drain • Three dimensional inclinometers(pitch, roll and yaw) • Utrasound distance sensor for obstacle avoidance • Compass sensor for heading control
Goals • Immediate design goal: 25 miles in the desert without intervention • “It could be told to go to a particular location to send images back to base from the camera in its tail.“
Higher Level Behaviors • Ultrasound based obstacle avoidance • Compass-based direction control • Speed control, height control • Inclinometer-based pitch control and roll control
Walking Behavior • Biomimetic: based on studying biological motion • In this case: scorpion movement • Two forms: normal motion patterns and reflexes
Central Pattern Generator • Nervous systems produce patterns independent of their sensory input • Neural circuits that produce self-sustaining patterns of behavior
Neural structure • Able to produce rhythmic signals • Used as motor patterns • No sensory feedback • Not learned or adapted • Are low level species specific locomotion behaviors
Controlling the CPGs • Motions for forward, backward, lateral left, etc., implemented as finite state machine • Functionally equivalent to the command neuron pattern • Related to subsumption architecture and its finite state representation
Basic Motion Pattern • Lower level behavior • Combinable “basic motion patterns” (BMP) • Describes a trajectory of the leg in joint angle space • From behavior point of view neuronal ensemble becomes a behavior ensemble • Controls leg in normal circumstance
BMP • More than one may be active at a time • Each may have different strength • Different behaviors may simultaneously influence activation of a BMP • Observed behavior is result of overlaying all the active patterns
Behavior in Practice • Higher level behavioral change • BMPs are stimulated • Desired pattern produced by overlaying all stimulated BMPs • All behavior between any two: forward and lateral right simultaneously means all slopes of the diagonal are possible
Transition • New pattern goes through fading process so changes are smooth • Behavior is result of current stimulation and old also • Signals are generated for the motor controllers
Reflexes • Deal with environmentally induced events • New level of control • Triggered by motor current and angular displacement error • Overwrites CPG for a short time with its own sequence • Example: move leg back and lift higher
Figure reproduced from Spennenberg and Kirchner, An Approach...