Download
1 / 32
370 likes | 690 Views
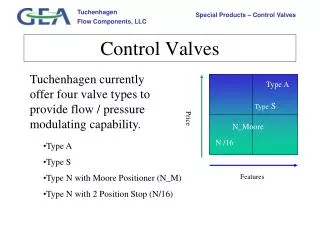
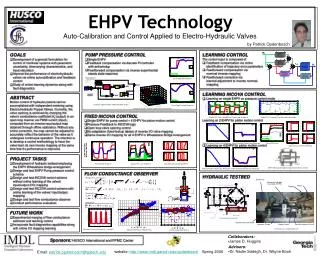
Control of Electro-Hydraulic Poppet Valves (EHPV). PATRICK OPDENBOSCH Graduate Research Assistant Manufacturing Research Center Room 259 Ph. (404) 894 3256 gte608g@mail.gatech.edu. Georgia Institute of Technology. George W. Woodruff School of Mechanical Engineering.

E N D
Control of Electro-Hydraulic Poppet Valves (EHPV) PATRICK OPDENBOSCH Graduate Research Assistant Manufacturing Research Center Room 259 Ph. (404) 894 3256 gte608g@mail.gatech.edu Georgia Institute of Technology George W. Woodruff School of Mechanical Engineering Sponsored by: HUSCO International and the Fluid Power Motion Control Center
AGENDA • INTRODUCTION. • NLPN. • CURRENT TO Kv MAP. • CONTROL APPROACH. • FUTURE WORK. • CONCLUSIONS.
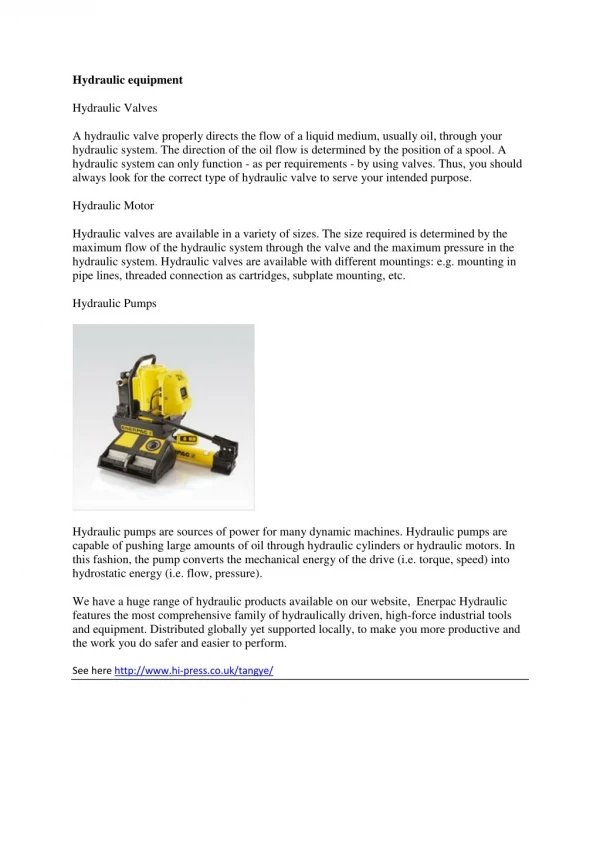
EHPV FEATURES: • Proportional flow area control • Bidirectional Capability • “Zero” leakage • Low Hysteresis • 12 Volt,1.5 Amp max (per solenoid) US PATENT # 6,745,992 & 6,328,275 Modulating Spring Coil Pilot • ADVANTAGES OVER SPOOL VALVES: • EHPV’s offer excellent sealing capabilities • Less faulting • High resistance to contamination • High flow to poppet displacement ratios, • Low cost and low maintenance, • Applicable to a variety of control functions. Armature Armature Bias Spring Pilot Seat Sensing Piston Pressure Compensating Spring APPLICATIONS: Pressure & Flow Control • Construction machinery • Robotics/manufacturing • Automotive industry (active suspension) Side Port Main Poppet Nose Port
n PR KvB QB PB AB QA AA PA KvA PS US PATENT # 5,878,647 EMPLOYMENT OF POPPET VALVES IN ACTUATOR MOTION CONTROL 4 EHPV on wheatstone bridge arrangement • METERING MODES: • Standard metering extend • Low side regeneration extend • Low side regeneration retract • High side regeneration • Standard float Wheatstone bridge assembly view
Calculate desired flow, Calculate desired speed, n HIERARCHICAL CONTROL US PATENT # 6,732,512 & 6,718,759 Read port pressures, PsPRPAPB Hierarchical control: System controller, pressure controller, function controller Calculate equivalent KvEQ Determine Individual Kv KvB KvA Determine input current to EHPV isol=f(Kv,DP,T)
LOCAL (LOWER LEVEL) CONTROL INPUT-OUTPUT MAP: • Currently obtained through extensive offline calibration • Different valves (sizes) require different maps (specifically tailored) • Offline map might not accurately reflect valve behavior after considerable continuous operation PROBLEMS: • EHPV transients might not be as desired • Open loop sensitivity to disturbances • Flow forces on the main poppet and the pilot harm the hydro-mechanical compensation especially at high DP • Effects are different between forward and reverse flow Flow conductance coefficient Kv as a function of input current and pressure differential
IMPROVED LOCAL CONTROL INPUT-OUTPUT MAP PROPOSED SOLUTIONS: • Online learning of the input-output map through suitable training criterion. • Compatibility of adaptive look-up table with existing industrial trends • Improve mapping that more accurately reflects valve behavior after considerable continuous operation • Development of robust observer for the online estimation of the KV. OBJECTIVES: • Implementation of feedback control with the aid of soft sensor technology and online training algorithms • Improve transient behavior • Make the valve more intelligent and self contained
NODAL LINK PERCEPTRON NETWORK (NLPN) • MAIN FEATURE • Approximates nonlinear functions using a number of local adjustable functions. The NLPN is a three-layer perceptron network whose input is related to the output by: • Basis functions are chosen so that • f1=1 • The set B={fi} is a linearly independent set i.e. if then for i =1 … N NLPN structure • For some l > 0, it is true that The idea is to choose wi and fi so that More details found at: Sadegh, N. (1998) “A multilayer nodal link perceptron network with least squares training algorithm,” Int. J. Control, Vol.70, No. 3, 385-404.
TRAINING • Once a basis function structure is chosen, train the network to learn the “weights”. DELTA RULE LEAST SQUARES • HOW IT WORKS (1D EX) • Triangular basis function structure is chosen • Weights are computed using least squares f1 f2 f3 Function to be approximated: x
COMMON BASIS FUNCTIONS Gaussian Triangular Hyperbolic A B C A B C A B C So that at most 2n components of F are nonzero. For multidimensional input space: For example,
COMMON APPLICATIONS • Offline curve fitting Actual Map NLPN approximation Approximation Error • Filtering • System identification • Selmic, R. R., Lewis, F. L., (2000) “Identification of Nonlinear Systems Using RBF Neural Networks: Application to Multimodel Failure Detection,” Proceedings of the IEEE Conference on Decision and Control, v 4, 2001, p 3128-3133 • Sanner, R. M., J. E. Slotine, (1991) “Stable Adaptive Control and Recursive Identification Using Radial Gaussian Networks,” Proceedings of the IEEE Conference on Decision and Control, v 3, 1991, p 2116-2123. • Sadegh, N., (1993), “A Perceptron Network for Functional Identification and Control of Nonlinear Systems,” IEEE trans. N. Networks, Vol. 4, No. 6, 982-988
D P ( ) = D i G P , K V NLP N + i K sol v _ AC T EHPV K v _DES + Adaptive Look-up table + PID x meas _ Soft K v _ ES T Sensor APPLICATION TO CONTROL OF EHPV Initially proposed control scheme: Feedback adaptive control scheme Testing of NLPN map learning: Oil Properties: CITGO A/W Hydraulic Oil 32: Viscosity: A = 5.68x10-9 [Ns/m2] B = 4827.6 [1/K] Density: C = 1056.1 [kg/m3] B = -0.647 [kg/m3K]
SIMULATED STEADY STATE EHPV Kv Forward flow At constant temperature At constant opening
SIMULATED INVERSE MAP ESTIMATION Forward flow
EXPERIMENTAL ESTIMATION • Steady state data was obtained from the Hydraulic circuit employed at the Hardware-In-the-Loop (HIL) Simulator Hardware-In-the Loop (HIL) Simulator Hydraulic circuit employed at the HIL EHPV mounted on the HIL. Quick connections for forward and reverse flow
EXPERIMENTAL MEASUREMENT OF STEADY STATE FLOW CONDUCTANCE COEFFICIENT Kv. Forward Kv as a function of Pressure differential and input current Reverse Kv as a function of Pressure differential and input current Forward: Side to nose Reverse: Nose to side
FORWARD Kv AND isol MAP LEARNING Kv map Kv map learning isol map isol map learning
REVERSE Kv AND isol MAP LEARNING Kv map Kv map learning isol map isol map learning
EHPV NONLINEAR MAP Nonlinearities arise from • State constraints • Nonlinear flow models • Bidirectional mode • Model switching • Electromagnetic nonlinearities Response is dominated by second order dynamics PRELIMINAR STEP: BLOCK-INPUT FORM Let a system be described by: Then, it can be transformed to a system such that: Trivial example: For m=2:
TRACKING CONTROL Let the nonlinear Function representing the behavior of the EHPV be expressed in block-input form by: where, Then linearizing about, yields, Assumptions: 1. The system is strongly controllable: there is a unique input so that 2. The controllability matrix Q has full rank for all inputs and states.
Proposed control law: where, (NLPN learning) Upon substitution into the error equation, Assumption: This result combined with the training law is used to study the stability of the closed loop system.
ESTIMATION TASK The control law requires the knowledge of the JacobianJk* and the input matrixQk*: Furthermore, the control law requires the knowledge of the desired states dXk For the desired states dXk To obtain an estimate of the of the JacobianJk* and the input matrixQk*:
The JacobianJk* and the input matrixQk* can be approximated by Procedure: Applying the stack operator and the Kronecker product or Looking for
MODIFIED BROYDEN METHOD TESTING: Simulation Results SIMULINK model
TASKS TO BE ACCOMPLISHED: • Debug algorithms • Investigation of other possible algorithms for matrix estimation • Tune up and testing of NLPN controller and matrix estimators in the Hardware-In-the Loop simulator • Investigate robustness • Development of nonlinear Kv observer • Research possible online calibration methods. • Explore position control accuracy
RESEARCH OBJECTIVE • Investigation and development of an advanced control methodology for the EHPV using online training and soft sensing technology. NLPN • Development of nonlinear mapping tool. • Design with flexibility in basis functions • Approximation of f: RnRm CURRENT TO Kv MAPPING • Simulation of direct and inverse mappings • Simulation of steady state mapping including temperature effects • Experimental application for forward and reverse flow conditions on both direct and inverse mappings CONTROL APPROACH • Development of NLPN controller • Matrix estimation through modified Broyden method