Download
1 / 23
230 likes | 360 Views
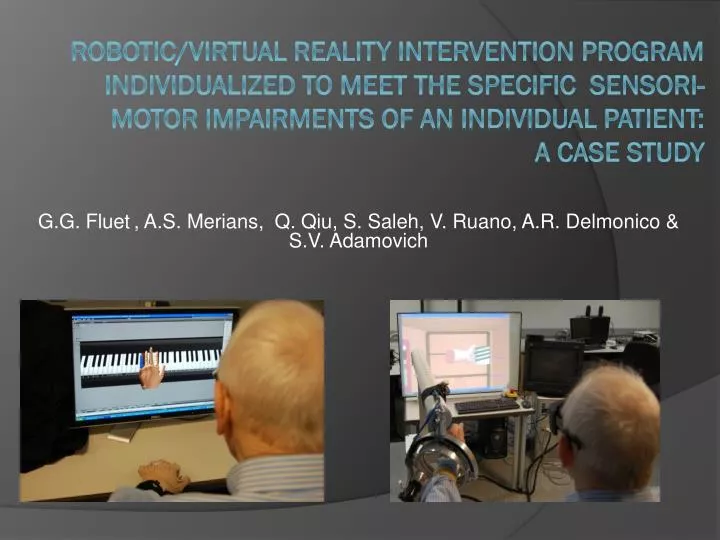
G.G. Fluet , A.S. Merians , Q. Qiu , S. Saleh , V. Ruano , A.R. Delmonico & S.V. Adamovich. Robotic/Virtual Reality Intervention Program Individualized To Meet The Specific Sensori -motor Impairments Of An Individual Patient: A Case Study.

E N D
G.G. Fluet, A.S. Merians, Q. Qiu, S. Saleh, V. Ruano, A.R. Delmonico & S.V. Adamovich Robotic/Virtual Reality Intervention Program Individualized To Meet The Specific Sensori-motor Impairments Of An Individual Patient: A Case Study
Standardized vs. Customized Interventions Studies examining robotically facilitated and virtually simulated rehabilitation have produced outcomes equivalent to optimized protocols of traditionally presented rehabilitation These studies utilize standardized protocols applied to large groups. Kwakkel 2007, Mehrholz 2008, Lo 2009, Laver 2012, Saposnik 2012 Fluet-Merians-Adamovich (Unpublished)
Standardized vs. Customized Interventions Multiple authors cite the flexibility of robotic systems as one of their major strengths. Adamovich 2009, Brewer 2009 Hypothesis Could studies of robotic rehabilitation that utilize a highly standardized protocol be underestimating the potential effectiveness of this modality?
Customized Interventions Task Parameter Adaptation Parameters for successful completion of a task are modified as the intervention is performed in an attempt to maintain the highest training intensity possible Merians 2011, Cameriao 2011 & 2012
Objectives Present an intervention utilizing robots integrated with virtual environments designed to address the specific impairments demonstrated by an individual subject. Discuss modifications of the intervention made based on the subjects responses to the intervention
Subject PM is an 85 year-old gentleman with left hemiparesis secondary to an intracerebral hemorrhage five years prior to his examination. Uses a power wheelchair for mobility but is able to walk up to 150 feet with contact guard using a cane. Performs self care with 25-50% assistance Performs PT / OT 2-3 hours biweekly x 4 years in his home
Intervention Three ninety minute sessions / week 4 weeks Six simulated activities Impairment chosen to address Initial configuration Modified configuration based on response
Reach TouchSynergistic extension of his trunk during shoulder flexion(Arm elevation AROM) Stable Trunk Workspace is increased daily Simulation recalibrated weekly
Cup ReachSynergistic extension of his trunk during shoulder flexion(coordination of trunk flexion and arm elevation) Encouraged a forward trunk flexion, then reach strategy Workspace is increased daily Simulation recalibrated weekly Helped subject challenge himself during final week calibration
Virtual Piano TrainerInability to flex fingers individually Poor response to first week Added CyberGrasp 100% of second week 5 Minutes of CybeGrasp third week No CyberGrasp final week
Hammer Task Finger Extension (dynamic)Difficulty stabilizing hand while manipulating objects y z z x x 0.626 cm/sec 1.018 cm/sec Increased or decreased target size based on success or failure of preceding rep
Space PongDifficulty controlling the aperture of his hand 100% Gain Small response to first week of training Scaled gain down Weaned back over balance of intervention 30% Gain
Hammer Task Pronation (fixed)Difficulty performing activities requiring pronation of his hand Poor initial response Scaled gain up No consistent response
Clinical Outcomes Activity Level Synergistic trunk extension during arm elevation
OutcomesKinematics during untrained activity target 2 object 3 start 1
OutcomesParticipation Level 24 Hour Activity Monitoring
Discussion No adverse responses Robust improvements Activity level Participation level Despite…….. chronic stroke advanced age multiple co- morbidities extensive rehab history
Discussion Customized Six activities chosen from a suite of 18 Resulting in improved performance in 5/6 simulations Modified 2 original configurations 4 modified configurations Correlation between improvements in simulation performance and functional improvements Rohafza 2012
Conclusion Expansion of the examination of robotically facilitated / virtually simulated rehabilitation to include: Customized interventions Modified based on patient performance Leverage a larger percentage of the advantages unique to these training modalities ………..
Thank you !! University of Medicine and Dentistry of New Jersey New Jersey Institute of Technology NJIT NJIT-RAVR Lab Rehab Team Collaborators Alma S. Merians PT, PhD Gerard G. Fluet DPT, PhD SohaSaleh PhD QinyinQiu PhD Ian La Fond MS Sergei Adamovich PhD Andrea R. Delmonico OTR-L ViviannaRuano PT Approval by the Institutional Review Boards of UMDNJ and NJIT Supported by NIH Grant RO1 HD58301