Download

1 / 9
90 likes | 222 Views
Calibrating the Myro Robot Movements A Teacher Resource. Why Calibrate the Robot?. The commands for forward movement and turning each require two input variables – speed and time. forward(speed, time) turnRight(speed, time) turnLeft(speed, time)

E N D
Why Calibrate the Robot? The commands for forward movement and turning each require two input variables – speed and time. forward(speed, time) turnRight(speed, time) turnLeft(speed, time) What formula will instruct the robot to travel a set distance? 8 meters
The Slope Formula From math, the slope formula is written: y = mx + b In terms of robot movement, it is possible to measure how far a robot travels or turns in a set amount of time. Using the slope formula, we can write: distance (y) = m*time(x) + b The y-intercept value bequals zero because at zero time, the robot travels or turns zero distance. Therefore, we drop b from the equation. The new equation becomes: y = mx distance = slope* time
Using the Slope Back to the original problem, how to write programming code that instructs the robot to travel or turn a set distance. Re-arranging the distance = slope* time formula to solve for time provides the needed value. The formula becomes: time = distance /slope For example, if the robot needs to travel exactly 8 meters, the command would be: forward(speed, time) forward(speed, distance/slope) The following slides demonstrate how to find the distance, time and slope values.
Make an Excel Table to Record Data Add a formula that calculates Average
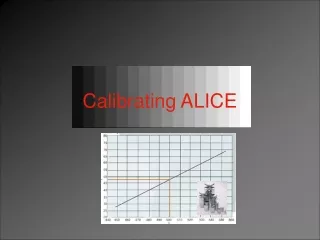
Ctrl+click to highlight the Time column and Average Distance column,. Select Insert Scatter to graph the data. Right-click on the chart line, choose Format Trendline, Set intercept = 0 and Display equation on chart. If desired, a Speed column can be added to display the “slope” for each time interval.
Slope Formula ExampleLinear Motion To travel 8 meters: forward(speed, distance/slope) forward(1.0, 8/36.174)
Source Files • http://homepages.ius.edu/rwisman/C490/html/Scribbler.gif • Myro Scribble Video – D. E. and K. R. Wright • http://www.leehansen.com/clipart/Scrapbook/Boys/pages/check-flag.htm