Download
1 / 12
120 likes | 231 Views
This paper presents a minimum cost path search algorithm designed to navigate tile-based obstacles within a rectangular area. This classical problem has significant applications in robotics and VLSI routing. We build upon earlier approaches, specifically targeting issues like edge cost accuracy in tile expansion algorithms. Our method introduces an accurate cost propagation through tiles, utilizing a Linear Minimum Convolution (LMC) formulation for efficiency. We outline the algorithm’s mechanics, present a tile graph structure, and discuss future research directions, particularly in VLSI applications.

E N D
A Minimum Cost Path Search Algorithm Through Tile Obstacles Zhaoyun Xing and Russell Kao Sun Microsystems Laboratories
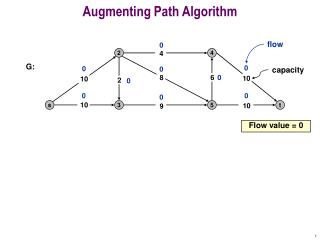
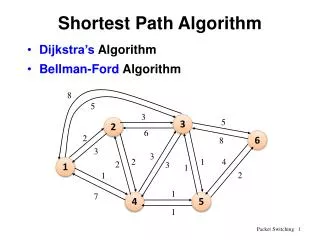
Search Through Tile Obstacles • A classical problem • Find a path for two points through some obstacle tiles in a rectangular area • Many applications • Robotics arm path searching • VLSI routing • Previous approaches • Line probe based algorithms • Graph based algorithms T S ISPD 2001
All try to build a graph that contains the shortest path Maze uniform graph Non-uniform graph Connection graph Connection graph Wu et al, 1987 Extend S/T and obstacle boundary lines. Until hit an obstacle or a boundary edge Graph size is is obstacle number Graph Based Search Algorithm T S ISPD 2001
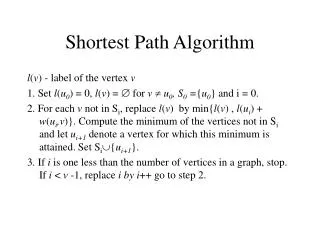
Extend only in one direction Unoccupied space is fractured into maximal tiles Tile Graph • Nodes: space tiles and S/T • Edges: adjacency T 1 1 3 T 2 3 2 4 4 6 6 5 5 7 7 9 8 9 8 10 10 S 11 12 12 11 13 13 S ISPD 2001
Motivations • Tile graph is small • Size is linear in the number of obstacle tiles • Previous tile expansion approaches • Not accurate edge cost • The search is guided by the estimated cost • Our approach • Guide the search using an accurate cost propagation ISPD 2001
Outline of the Rest of the Talk • Cost propagation through a tile • Cost definition • Propagation formulation • Linear Minimum Convolution (LMC) • The minimum cost path search algorithm • Conclusion and future works ISPD 2001
Recti-linear cost inside a tile Cost between two points and Focus Cost propagation from [a, b] to [c, d] Example Min cost is 0 on [a, b] Min cost on [c, d] is It is a piecewise linear function c(x) x c d b Cost Propagation through A Tile G F x d c h s b a E ISPD 2001
Assumptions The minimum cost function on interval [a, b] is a piecewise linear function . The min cost function on [c, d] Is still a piecewise linear function Bottom line How to compute efficiently? Approach Use a notation, we call it, Linear Minimum Convolution (LMC) Cost Propagation through A Tile G F x d c h s b a E ISPD 2001
Definition and a piecewise linear function defined on [a, b], their LMC f(x) is a line segment with slope k Linear Minimum Convolution (LMC) a b ISPD 2001
a b LMC • Observations • Easy to compute LMC of each line segment • Still need to compute the minimum function of line segments • Brute force approach is • Compare f(x) with 2n legs (beam lines) • Our clipping algorithm is linear • See Proceedings for detail ISPD 2001
Search Algorithm • Get tile list first • Use A* search • Get a tile list containing the shortest path • Retrieve the point path • Build a connection grid graph based on tile list • This graph is small ISPD 2001
Conclusion and Future Work • A new minimum cost path search algorithm • Tile graph based • Accurate cost propagation from tile to tile • Linear Minimum Convolution • Future works • Explore the applicability of this algorithm to the VLSI routing • Experiments • Thank you! ISPD 2001