Autonomous Object Recognition and Manipulation Vehicle Design Overview
80 likes | 219 Views
This document outlines the design criteria and component selection for an autonomous vehicle (DOG) capable of identifying, tracking, and manipulating objects within its environment. Key abilities include target identification via image capture, vehicle direction control, obstacle recognition, autonomous object manipulation, and precise GPS waypoint navigation. Critical constraints involve weight, power consumption, size, and image processing speed. The selected parts range from microcontrollers, sensors, grippers, to drive systems, ensuring efficient and effective vehicle performance in real-time applications.

Autonomous Object Recognition and Manipulation Vehicle Design Overview
E N D
Presentation Transcript
Design Decisions SerajDosenbach Greg Lammers Beau Morrison AnanyaPanja
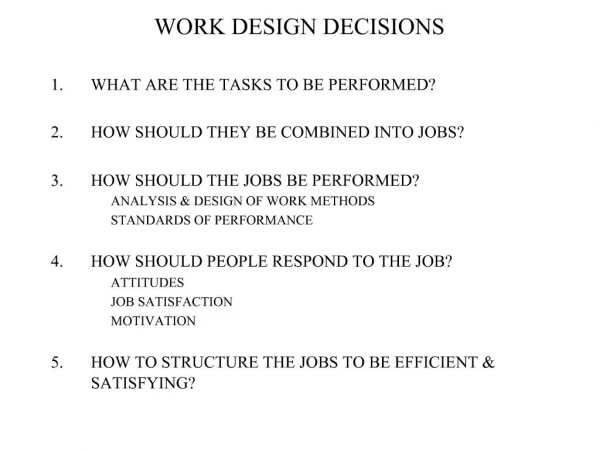
P.S.S.C.’s • An ability to identify a target object within a captured image. • An ability to control vehicle direction and speed. • An ability to recognize nearby objects in anticipation of avoiding said objects. • An ability to grab/pick up an object autonomously. • An ability to record a GPS location in order to verify that DOG has returned to said waypoint.
Block Diagram Camera GPS Range Finders Drive Motors Serial Analog PWM USB Intel Atom Micro Controller Pan/Tilt Servos Serial PWM Analog Gripper Servos PWM Buttons and Switches
Important Constraints • Weight • More weight will require more torque to maintain the same speed which will draw more current and dissipate power more rapidly. • Power • More power draw will require larger battery pack which will increase the weight. • Size • The larger our DOG is the more objects it will have to avoid, and the heavier it will get. • We have a limited amount of space to fit all of our parts onto the chassis. • Image Processing Speed • Require real-time input from the image tracking algorithm in order to effectively track the target object.
Part Selection – Micro controller • Micro: • Both have: PWM, SCI, SPI, I2C, ADC Freescale MC9S12A256CFUE • QFP, Familiar, 16Bit PIC32MX320F032H • QFN, Harvard Architecture, Pipelined, 32Bit
Part Selection - Sensors • GPS: PMB-248 GPS Receiver + Cable ($25) • Cheep, Accurate (±2m) • Range Finders: Maxbotix LV-MaxSonar-EZ3 High Performance Sonar Module ($28) • Narrow Beam Pattern, Long range
Part Selection – Grippers and Servos • Gripper: The Big Gripper ($27) • Size, Cheep • Servos: Hitec HS-422 Servo Motor ($13) • Average torque, High Speed
Part Selection – Drive System • Motor: 16:1, 28mm Planetary Gearmotor, RS-385 Motor ($30) • High torque, High RPM • Wheels: 2-7/8" x 0.8", 1/2" Hex Mount, 50A ($6) • Size, Compound • Hubs: Matching hubs ($5)