Download
1 / 19
190 likes | 223 Views
Join the National Aerospace Laboratories, M.S. Ramaiah School of Advanced Studies, and CORAL Technologies Pvt. Ltd. in developing cutting-edge Micro Air Vehicles (MAVs) and Unmanned Ground Vehicles (UGVs) for surveillance missions. These systems aim to complete the mission objectives set for the MAV08 event, including locating terrorist squads, identifying hideout locations, and rescuing hostages with precision. The project involves integrating fixed-wing and rotary MAVs along with advanced UGVs to navigate terrains, avoid obstacles, and execute rescue operations effectively. With state-of-the-art technologies and equipment like the "Black Kite" MAVs and the "Kainos" UGV, this initiative sets a new standard in autonomous surveillance missions. Dive into the future of aerial and ground surveillance with this collaborative project.

E N D
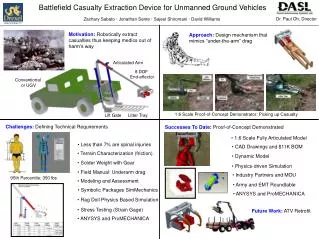
Development of Mission Based Micro Air vehicles and Unmanned Ground Vehicle. Team Members: National Aerospace Laboratories M S Ramaiah School of Advanced Studies CORAL Technologies Pvt. Ltd. E.N.R. Models Team Reg # 1015
Aim • To develop MAV & UGV systems to complete the mission stated for the MAV08 event
Plan of completing the Mission • Fixed Wing MAVs – Locate Terrorist Squad and the Hideout Location building where hostages are kept. Mines and Obstacles to be located. Mines and Obstacles to be marked on the Terrain Map. • The UGV will move through the terrain avoiding the obstacles by selecting an optimum path to reach 100 meters from the building. • The Rotary MAVs latched on to the UGV will take off autonomously and move closer to the building and sound sensors in the Rotary MAVs will locate the hostages by their shouting relayed through a sound box (simulated sound). • Commandos assigned to the team will get the instruction and rescue the hostages from the room.
Object’s Location Detection Path F-MAV Video Mosaic Terrain UGV Control To Next Location Covered Positions (CP) UGV Ingress Point (IP) MAV Land Point (LP) UGV End Point (EP) Perching Point (PP) Land Mines (LM) Obstacles (OB) UGV Path Path Finding UGV Sensors Obstacle Detection R-MAV Path N UGV, MAV Location If EP Y R-MAV Launch From UGV R-MAV Control To Next Location Y Room R-MAV AV Control R-MAV Sensors Obstacle Detection Analysis Video Audio End N AV Control System Flowchart 4 of 38
Equipment Used • Fixed Wing MAVs – 3nos • UGV – 1no • Rotary MAV – 1nos 300mm Sphere 325mm Sphere 500mm Sphere
Fixed Wing MAV – “Black Kite” (S)Specifications Planform: Inverse Zimmermann. Airfoil: “Selig 4083”- Mean Camber Payload: Miniature Color Camera. Weight with Payload: Size: Fits in 300mm Sphere. Wing Span: 262mm Wing Area: 0.036 e6 mm2 Chord Length: 211mm Aspect Ratio: 1.906 Propulsion: AXi2204/54 Brushless Motor APC 6”x4”
Fixed Wing MAV – “Black Kite” (M)Specifications Planform: Inverse Zimmermann. Airfoil: “Selig 4083”- Mean Camber Payload: Miniature Color Camera. Weight with Payload: Size: Fits in 325mm Sphere. Wing Span: 316.6mm Wing Area: 0.059 e6 mm2 Chord Length:245mm Aspect Ratio: 1.69 Propulsion: AXi2204/54 Brushless Motor APC 6”x4”
Fixed Wing MAV – “Black Kite” (XL)Specifications Planform: Inverse Zimmermann. Airfoil: “Selig 4083”- Mean Camber Payload: Miniature Color Camera. Weight with Payload: Size: Fits in 500mm Sphere. Wing Span: 432mm Wing Area: 0.126 e6 mm2 Chord Length: 359mm Aspect Ratio: 1.48 Autopilot: CORAL Autopilot Pearl-mAP-0701 Propulsion: AXi2204/54 Brushless Motor APC 7”x6”
NAL MAVs MEGHDOOTH NAGA 2 DISC NAGA 1 FEATHER 2 FEATHER 3 FEATHER 1 Under Development: MEGHA and FEATHER 4 and SURYA
UGV: “Kainos”Specifications Size: Wheel Base: 1.5m Width: 0.9m Ground Clearance: 0.3m Weight: 400kgs approx Drive: DC Motor Power: 4.5kW Average Speed: 40 m/s. Steering Control: Electronic Power Module Payload: Miniature Color Camera. Autonomy: Point to Point movement. Collusion Avoidance: Optic Flow Sensors and Ultrasonic Sensors
Rotary MAV • Size: Fits in 300mm Sphere
Activity chart • Fixed MAV will complete the required circuit and simultaneously capture video images. • Stills from the video will be used to locate the mines and obstacles. • This will be marked on the terrain map and the UGV path will be generated. • The UGV will follow the path defined and go to the parking point. • The rotary MAV will be launched into the perch points and transmit sound and video. • The commandos will be signaled to enter the hostage room.