Download
1 / 20
210 likes | 381 Views
Vehicle Detection in Aerial Surveillance Using Dynamic Bayesian Networks. Hsu-Yung Cheng , Member, IEEE, Chih-Chia Weng, and Yi-Ying Chen IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 21, NO. 4, APRIL 2012. Goal. Introduction.

E N D
Vehicle Detection in Aerial Surveillance UsingDynamic Bayesian Networks Hsu-Yung Cheng, Member, IEEE, Chih-Chia Weng, and Yi-Ying Chen IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 21, NO. 4, APRIL 2012
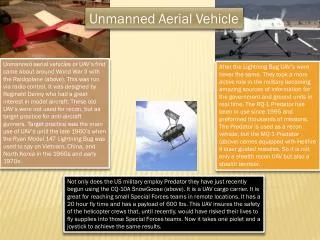
Introduction • These technologies have a variety of applications, such as military,police, and traffic management. • Aerial surveillance is more suitable for monitoring fast-moving targets and covers a much larger spatial area.
Introduction • Cheng and Butler [8] performed color segmentation via mean-shift algorithm and motion analysis via change detection. • In [11], the authors proposed a moving-vehicle detection method based on cascade classifiers. • Choi and Yang [12] proposed a vehicle detection algorithm using the symmetric property of car shapes.
Background Color Removal • quantize the color histogram bins as 16*16*16. • Colors corresponding to the first eight highest bins are regarded as background colors and removed from the scene.
Feature Extraction:Local Feature Analysis • After evaluation, is known. • Use the gradient magnitude G(x,y) of each pixel of moment-preserving. • Tmax =T ,Tmin=0.1*(Gmax-Gmin) for Canny edge detector. • Harris detector is for the corners.
Feature Extraction:Color Transform and Color Classification • In [16],they proposed a color domain (u,v) instead of (R,G,B) to separate vehicle and non-vehicle pixels clearily. • Use n*m as a block to train SVM model to classify color.
Feature Extraction • We extract five types of features, S,C,E,A and Z for the pixel. • A=L/W • Z=blue counts at left
Dynamic Bayesian Network • Use some videos to train the probabilities with people marked ground truth. • Vt indicates if a pixel belongs to a vehicle. • P(Vt|St) is defined as the probability that a pixel belongs to a vehicle pixel at time slice given observation St at time Instance t.