Understanding Process Control in Chemical Systems: Analysis and Safety
This session, led by Kevin Siggard and Tierra Duffield, focuses on process control principles in chemical engineering. Key assumptions are presented, highlighting the negligible pressure drop and the incompressibility of flow. The discussion pivots on safety implications, particularly concerning carbon monoxide leaks, emphasizing the critical time sensitivity of exposure. The adaptation of block diagrams to incorporate disturbance variables is also covered, including the logic necessary for retuning a PI controller when changes affect the block transfer function.

Understanding Process Control in Chemical Systems: Analysis and Safety
E N D
Presentation Transcript
Process Control HW 10 Help Session Kevin Siggard Tierra Duffield
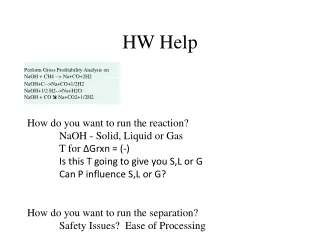
10.1 • Assumptions • Pressure drop is negligible (given in problem statement) • Constant Pressure and Temperature • Flow is incompressible • The density of the air is unaffected by the Chlorine concentration
10.1 • Would this be acceptable if this were a carbon monoxide leak? • NO • It takes a very short amount of time for an abundant supply of carbon monoxide to saturate the blood stream • ∴ 1.72 minutes is unacceptable and possibly deadly
11.1 • See Fig. 11.8 for a standard block diagram • The only change that must be made to Fig. 11.8 is to add one more disturbance variable because the problem statement tells us to treat both the feed flow rate and the feed composition xf as disturbance variables
11.1 (Fig. 11.8) D Gd Yd Ysp Gp Ysp U Yu Gv P E Y Km Gc Gm Ym
11.1 (Fig. 11.8 adapted) Yd1 D1 Gd1 D2 Gd2 Yd2 Y Ysp Gp Ysp U Yu Gv P E Km Gc Gm Ym
11.3. P only controller for a stirred-tank heater control systempart a)
Typo in 11.4 Apparently, there are typos in problem statement. Specifically use and
11.4 part a) C ‘2 (s) Gd lb solute/ft^3 X1 Q’2(s) P’T(s) C’3sp(s) C’3(s) X2 C’3sp(s) Gv Gp G_IP E(s) Km Gc P’(s) ma ma psi ma Gal/min lb solute/ft^3 C’3m (s) Gm C’3 (s) lb solute/ft^3 ma
11.4 part c) • The trick for deciding if the PI controller needs to be retuned is determining whether or not the suggested change affects the block transfer function. If the block transfer function changes, then you will need to retune.
11.5 part d) and e) e) • The system is under damped so it will oscillate.