Advanced Control Algorithms for Process Optimization
Explore OBAS, OBTR, TSTH, FLPV, LEAD/LAG, DTIME methods for optimal process control with input/output registration and testing. Developed algorithms improve system efficiency and precision.

Advanced Control Algorithms for Process Optimization
E N D
Presentation Transcript
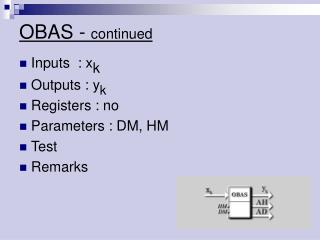
OBAS - continued • Inputs : xk • Outputs : yk • Registers : no • Parameters : DM, HM • Test • Remarks
OBTR • Purpose • Algorithm : if abs(xk - yk1)<=d then yk=xk else yk=yk1+sign(xk-yk)*d
OBTR - continued • Inputs : xk • Outputs : yk • Registers : yk1 • Parameters : d • Test • Remarks
TSTH • Purpose • Algorithm: if xk>=DM and xk<=HM then AD=0, AH=0 if xk>HHM then AH=1 if xk<DDM then AD=1
TSTH - continued • Inputs : xk • Outputs : AD, AH • Registers : no • Parameters : DM, DDM, HM, HHM • Test • Remarks
FLPV -conditional • Purpose • Algorithm: F=T/(T+tau) if abs(xk-yk)<=d then yk=xk else yk=xk*F+yk1*(1-F) yk1=yk
FLPV - conditional - continued • Inputs : xk • Outputs : yk • Registers : F, yk1 • Parameters : tau,T,d • Test • Remarks
LEAD/LAG • Purpose • Algorithm: F(s)= (1+Td*s)/(1+Ti*s) F1=Ti/(T+Ti); F2=(Td+T)/(T+Ti); F3= -Td/(T+Ti) yk=F1*yk1+F2*xk+F3*xk1 xk1=xk yk1=yk
LEAD/LAG - continued • Inputs : xk • Outputs : yk • Registers : F1, F2, F3,yk1, xk1 • Parameters: Ti, Td, T • Test • Remarks
DTIME • Purpose • Algorithm: Circle Buffer n = int (D / T) zac: i=i+1 output yk input x[ i ] if i = n then i = 0 go to zac
DTIME - continued • Inputs : xi • Outputs : yk • Registers : n, k, x[1:n] • Parameters: D, T • Test • Remarks