Download
1 / 18
180 likes | 336 Views
Application of Reconfigurable Computing Technology to Multi-KiloHertz Micro-Laser Altimeter (MMLA) Data Processing. Wesley Powell, Edward Hicks, Maxime Pinchinat Ground Systems Hardware Branch (Code 566) NASA Goddard Space Flight Center Greenbelt, MD 20771 Philip Dabney

E N D
Application of Reconfigurable Computing Technology to Multi-KiloHertz Micro-Laser Altimeter (MMLA) Data Processing Wesley Powell, Edward Hicks, Maxime Pinchinat Ground Systems Hardware Branch (Code 566) NASA Goddard Space Flight Center Greenbelt, MD 20771 Philip Dabney Geoscience Technology Office (Code 920.3) NASA Goddard Space Flight Center Greenbelt, MD 20771 Presentation P17
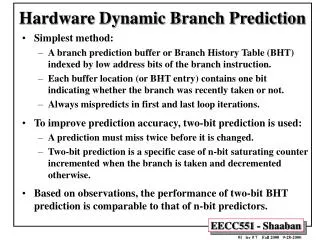
Introduction • The presentation describes; (a) how reconfigurable computing technology was used to accelerate real-time data processing for the airborne MMLA instrument, and (b) the results achieved. • This work was performed as an IR&D project for the purpose of: • Develop in-house capabilities to apply reconfigurable computing on future missions • Define reconfigurable computing architectures to serve as a basis for future spaceborne data systems • Enable single-photon-counting laser altimetry on future space missions • Enhance capabilities of the existing airborne MicroLaser Altimeter data system Presentation P17
MMLA Instrument Background • The MMLA is a single-photon-counting laser altimeter developed at NASA GSFC under the Instrument Incubator Program (IIP) • MMLA measures land surface features such as topography and vegetation canopy height • The MMLA has flown a number of times aboard the NASA P-3 aircraft acquiring data at several sites in the Mid-Altantic region • Key MMLA features are: • Very high laser fire rate (10kHz) • Uses very small, low energy, solid-state Micro-Laser • Can fly at high altitudes that don’t require special FAA clearances • Eye safe at ground level • Relatively small (10 – 20 cm) telescope • MMLA technology has several potential spaceflight applications Presentation P17
MMLA Concept • Laser Fires @ 10 kHz • Time-of-Flight (TOF) Measured for Each Pulse • For Each Pulse, the TOF of up to 16 “Ranges” (Falling within the • Specified Range Window) is Stored • Returns are Binned Based on Pulse Count and Range Times • Most Likely Signal Path is Computed • Only Ranges Corresponding to Signal are Saved Presentation P17
MMLA Data Processing • MMLA data processing extracts signal in order to: • Reduce the volume of data stored (i.e. discard noise returns) • Provide real-time display of measured surface • Data processing steps • Bin incoming return data to construct 2-dimensional Plotdata Array • Select most likely signal path through Plotdata Array • The most likely signal path can then be displayed to show measured surface • Only returns falling within selected path are stored Presentation P17
X – Horizontal Ground Track Bins 0 0 1 0 0 1 0 0 0 0 1 0 0 3 0 2 0 0 Range Window Y – Vertical Range 5 0 4 0 4 5 0 1 0 6 0 2 0 0 0 1 0 0 Frames Superframe Plotdata Array Construction • Return data formatted into [t, r] pairs, where “t” is laser fire time and “r” is time-of-flight • Histogram performed to create 2-dimensional Plotdata Array • “t” elements are grouped into frames in the X dimension • Typical frame size is 5 ms • “r” elements grouped into bins in the Y dimension • Typical bin size is 10,000 to 100,000 ps (1 to 10 meters) • A Superframe is a discrete number of frames (MM) that make up a Plotdata Array Presentation P17
Signal Path Selection • Selection is performed “brute force” by scoring every possible path through Plotdata Array • Paths are constrained by a “Cell Spread” parameter determining which cells can be transitioned to from a given cell (figure shows a Cell Spread of 3) • Each path is scored by totaling the number of returns in each cell • To be considered a signal path, a path must have NN of MM cells exceed a given threshold • The most likely signal path (if any exist) is the signal path with the highest number of returns Presentation P17
Computing Demands • The number of possible paths through a [Num_Bins x MM] array is: Paths = Num_Bins x (Cell Spread) (MM-1) • For a typical [50 x 6] (bins x frames) array and a Cell Spread of 3, there are ~ 12,000 possible paths • With a 10 kHz laser fire rate and typical array sizes, 33 arrays must be processed every second (i.e. ~400,000 paths processed per second) Presentation P17
MMLA Implementation • MMLA implemented with COTS components • Consists of 2 racks and a transmitter/receiver assembly • Navigation Rack • Provides system time reference and aircraft altitude, attitude, and heading • Controls ground reference camera • Ranging Rack • Houses RGUI and RDATA computers • RGUI Computer (Dual Pentium 850 MHz, Windows 2000) • Performs signal extraction processing • Controls instrument and displays instrument status • Stores signal data • RDATA Computer (VXI with DOS Computer and Data Acquisition Cards) • Performs ranging measurements • Transmitter/Receiver Assembly • Houses laser, telescope, and optical components Presentation P17
MMLA Baseline Configuration Ranging Rack RGUI Computer Time Altitude Attitude Heading Laser Fire Signals NT GSE Multi-Channel Scaler Navigation Rack Signal Processing DLL Control Nat. Inst. MXI Interface Transmitter Receiver Assembly RDATA Computer Nat. Inst. MXI Interface Ranges Processor Time-to-Digital Converter Return Signals Presentation P17
Reconfigurable Computing (RC) Data System • Modifies existing RGUI computer • Annapolis Microsystems Firebird FPGA Board • Based on Xilinx Virtex XCV2000E FPGA • Includes 36 MB SRAM in 5 separately addressable banks • Resides on 64-bit 66 MHz PCI bus • Reconfigurable Computing (RC) Application • Operates in parallel with existing signal extraction software • FPGA Image performs signal extraction in hardware • RCIS (standalone DLL) integrates hardware processing with existing signal extraction software Presentation P17
RC Data System Configuration RGUI Computer Laser Fire Signals Multi-Channel Scaler NT GSE Return Signals Signal Processing DLL Control Nat. Inst. MXI Interface Measured Ranges Time Altitude Attitude Heading Annapolis Microsystems Firebird 8MB SRAM Virtex 2000E FPGA 8MB SRAM RCIS 8MB SRAM 4MB SRAM 8MB SRAM Presentation P17
RC Application Flow Instrument Data Structure Reformat into Firedata Array of [t, r] Pairs Build Plotdata Array Display Signal Path Path Select Path Trace Store Signal Returns Performed in FPGA Image Performed in RCIS Presentation P17
FPGA Image • Custom Modules • Build Plotdata Module constructs Plotdata Array • Path Select Module selects most likely signal path through Plotdata Array • Path Trace Module annotates Firedata Array ([t, r] pairs) to indicate which pairs are signal returns • Plotdata Memory implements the Plotdata Array in BlockRAM • Master Controller Module controls sequencing of the processing steps • Generic Annapolis Microsystems Modules • Register File interfaces custom modules to PCI bus • Memory Arbiter allows access to off-chip Firedata Memory • Memory Bridge interfaces Firedata Memory to PCI bus Presentation P17
FPGA Image Configuration Memory Bridge Resets Firedata Busses Build Plotdata Module Control Parameters (MM, NN, Cell Spread, Cell Thresh, Etc.) Firedata Memory Memory Arbiter Register File Firedata Bus Path Trace Module PCI Bus Status Start Signals Master Controller Module Path Select Module Int Done Signals Plotdata Memory (Dual Port BlockRAM) Plotdata Bus Xilinx XCV2000E FPGA Presentation P17
Results • FPGA Image • Uses ~ 15% of Virtex XCV2000E resources and 512 KB of off-chip SRAM • Operating at 74 MHz, can process ~ 1,000,000 paths per second • MMLA Results • Successfully integrated and ground tested with MMLA instrument • Demonstrates a performance gain of 9 over software processing • Benchmark Results • RC Application performance compared against signal extraction software routine running on a 1.2 GHz Pentium (2230 MIPS) workstation • Performance gain of 1.5 - 2.3 measured for large superframe sizes (MM > 7) • For small superframe sizes (MM < 6), software processing is faster • Estimated results on current spaceflight processors (based on Dhrystone MIPS ratings) • Performance gain of 5 – 15 on RAD750 (300 MIPS) • Performance gain of 50 – 150 on RAD6000 (35 MIPS) Presentation P17
Conclusion • Reconfigurable computing offers a considerable advantage over software based MMLA data processing • Order of magnitude performance gain demonstrated • Performance could be further improved by using parallelism • Reconfigurable computing is a viable option for use on a MMLA-based spaceflight instrument • Would offer a large performance gain over software running on spaceflight qualified processors • FPGA image would fit into flight qualified Xilinx XQVR1000 FPGA • Would use approximately 30% of resources • Sufficient room would remain to allow SEU mitigation techniques Presentation P17
Acronym List DLL Dynamic Link Library GSFC Goddard Space Flight Center FPGA Field Programmable Gate Array IIP Instrument Incubator Program IR&D Internal Research and Development MIPS Million Instructions Per Second MMLA Multi-KiloHertz Micro-Laser Altimeter NASA National Aeronautics and Space Administration RDATA Range Data Computer RGUI Ranging Graphical User Interface Computer SRAM Static Random Access Memory TOF Time of Flight Presentation P17