Download
1 / 19
200 likes | 313 Views
Learn about magnetic disk storage, reliability, RAID configurations, busses, and I/O schemes in computer systems. Understand performance measures and benchmarks for I/O operations.

E N D
CSCE 212Chapter 8Storage, Networks, and Other Peripherals Instructor: Jason D. Bakos
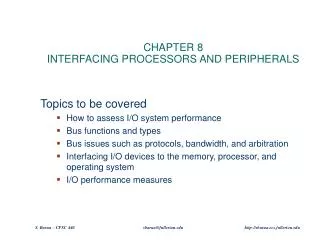
Magnetic Disk Storage: Terminology • Magnetic disk storage is nonvolatile • 1-4 platters, 2 recordable surfaces each • 5400 – 15,000 RPM • 10,000 – 50,000 tracks per surface • Each track has 100 to 500 sectors • Sectors store 512 bytes (smallest unit read or written) • Cylinder: all the tracks currently under the heads
Accessing Data • To read: • Seek to the track • Ave. seek times advertized as 3 ms to 14 ms but usually much better due to locality and OS • Rotate to the sector • On average, need to go ½ around the track • Transfer data • 30 – 40 MB/sec from disk, 320 MB/sec from cache • Controller time / overhead • ADAT = seek time + rotational latency + transfer time + controller time
Reliability • Mean time to failure (MTTF) • Mean time to repair (MTTR) • Mean time between failures (MTTF + MTTR) • Availability = MTTF / (MTTF + MTTR) • Fault: failure of a component • To increase MTTF: • Fault avoidance • Fault tolerance • Fault forecasting
RAID • Redundant Arrays of Inexpensive Disks • Advantages: • parallelism • cost • floor space (smaller disks have higher density) • Disadvantage: • adding disks to the array increases the likelihood of individual disk failures • Solution: • add data redundancy to recover from disk failures • small disks are inexpensive, so this reliability is less expensive relative to buying fewer, larger disks
RAID • RAID 0 • No redundancy • Stripe data across disks • Appears as one disk • RAID 1 • Mirroring • Highest cost • RAID 2 • Error control codes • No longer used
RAID • RAID 3 • Bit-interleaved parity • Add one parity disk for each protection group • All disks must be accessed to determine missing data • Writes access all disks for striping, then recalculation of parity • Example: • 1 0 1 0 • 1 X 1 0 • X=1 xor 1 xor 0
RAID • RAID 4 • Block interleaved parity • Stripe blocks instead of bits • Small writes only need to access one data disk and update parity • Only flip parity bits that correspond to changed data bits • Example: • 0011 1010 1101 0100 • 0011 XXXX 1101 0100 • XXXX=0011 xor 1101 xor 0100
RAID • RAID 5 • Distributed block-interleaved parity • In RAID 4, the parity disk is bottleneck • Solution: alternate parity blocks
RAID • RAID 6 • P + Q Redundancy • Add another check disk to be able to recover from two errors • RAID 1 and 5 are most popular • RAID weakness: • Assumes disk failures are not correlated
Busses • Shared communication link • Advantages: • Inexpensive, simple, extendible • Disadvantages: • Capacity is shared, contention creates bottleneck • Not scalable • Length and signaling rate limitations (skew, noise) Device 1 Device 2 Device 3
Busses • Typical bus: • data lines • DataIn, DataOut, Address • control lines • Bus request, what type of transfer • Busses are either: • synchonous • includes shared clock signal as a control signal • devices communicate with a protocol that is relative to the clock • example: send address in cycle 1, data is valid in cycle 4 • used in fast, short-haul busses • asynchronous • not clocked or synchronized • requires handshaking protocol
Bus Types ReadReq asynchronous (peripheral bus) Data Ack DataRdy Clock synchronous (system bus) Read Data
Model Computer System • Example computer system: • northbridge: fast interconnect for memory and video • southbridge: slower interconnect for I/O devices
I/O • I/O Schemes: • Memory-mapped I/O • Contolled by CPU • I/O devices act as segments of memory • CPU reads and writes “registers” on the I/O device • Example: status register (done, error), data register • DMA (Direct Memory Access) • Controlled by I/O device • DMA controller transfers data directly between I/O device and memory • DMA controller can become a bus master • DMA controller is initialized by the processor and I/O device • Polling • CPU regularly checks the status of an I/O device • Interrupts • I/O device forces the CPU into the operating system to service an I/O device request • Interrupts have priority (for simultaneous interrupts and preemption)
I/O Performance Measures • Transaction Processing • Database applications (i.e. banking systems) • Mostly concerned with I/O rate and response time • Benchmarks created by Transaction Processing Council (TPC) • TPC-C: complex queries • TPC-H: ad hoc queries • TPC-R: standard queries (preknowledge) • TPC-W: web-based simulates web queries • File System • MakeDir, Copy, ScanDir, ReadAll, Make • SPECFS (NFS performance) • Web I/O • SPECWeb (web server benchmark) • I/O performance estimation: simulation or queueing theory
Example Problem • CPU can sustain 3 billion instructions per second and averages 100,000 instructions in the OS per I/O operation • Memory backplane bus capable of sustaining a transfer rate of 1000 MB/s • SCSI Ultra320 controllers with a transfer rate of 320 MB/s and accomodating up to 7 disks • Disk drives with a read/write bandwidth of 75 MB/s and an average seek plus rotational latency of 6 ms • If the workload consists of 64 KB sequential reads and the user program requires 200,000 instructions per I/O operation, what’s the maximum I/O rate and the number of disks and SCSI controllers needed (ignoring disk conflicts)?