Download
1 / 20
210 likes | 637 Views
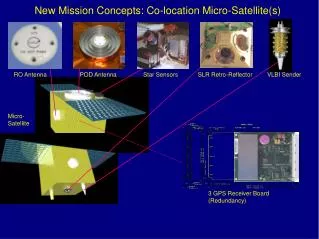
Design and Implementation of a Software-Based GPS Receiver. Anthony J. Corbin Dr. In Soo Ahn Wednesday, March 12, 2014. Project Summary. Software-Based Solution Advantages Size Cost Portability Implementation Sampling System Downconverter A/D Converter DSP System

E N D
Design and Implementation of a Software-Based GPS Receiver Anthony J. Corbin Dr. In Soo Ahn Wednesday, March 12, 2014
Project Summary • Software-Based Solution • Advantages • Size • Cost • Portability • Implementation • Sampling System • Downconverter • A/D Converter • DSP System • Simulates a microcontroller
Patents • The table below lists relevant patents. • Most of the patents are recent. • Notably, two of the patents were granted to Denso and Toyota.
Referenced Work • Kai Borre, Dennis M. Akos, Nicolaj Bertelsen, Peter Rinder, and Soren Holdt Jensent, Software-Defined GPS and Galileo Receiver : A Single-Frequency Approach. Birkhauser: Boston, 2007, pp. 29, 83, 105.
Goals • Implement a software GPS L1 signal model • Develop a software-based GPS receiver model for processing a sample input dataset • Implement the model in a high-level language such as C++ • Process the raw data using an embedded system or DSP kit using the model developed • Connect the embedded system or DSP kit to a sampling device and perform satellite signal acquisition • Compute position in real-time
SE4110 • Functions • LNA • Downconverter • A/D Converter • Output • Reference Clock • Sign Bit • Magnitude Bit
DSP Kit • 225 MHz • 2 MCBSPs • Multi-Channel Buffered Serial Ports • 16 Megabytes of RAM
Position Error • Estimated position is based on the sampling rate being 4 times the chipping rate. • ¼ of the distance represented by a chip is therefore the approximate error.
Time to First Fix [1] • A position fix requires that the ephemeris data is completely received. • This requires a complete frame of data, which takes 30 s to transmit. • However, it is unlikely that the receiver shall begin collecting data at the beginning of a subframe indicating that an extra subframe lasting 6 s must be received. • If the ephemeris data has already been received, the fix time is minimal.
Display • The display shall be relatively simple providing: • Latitude, Longitude, and Altitude • Earth-Centered, Earth-Fixed Coordinates (Relative) • UTC Time • Local time correction may be selected
L1 Signal Generation • A generated L1 sample is shown to the right. • The signal generated is based on the pseudorandom sequence generation shown on the next slide.
Cross-Correlation • The cross-correlation characteristics of the L1 signal are what make it important. • Different L1 signals do not correlate with each other! • The figure to the right shows a graphical representation of the plane of all correlation possibilities.
Preliminary Measurements • The GPS L1 signal is attenuated to a level below the noise floor. • The graph on the right shows the result of an FFT of the data from the SE4110L device.
References • [1] Kai Borre, Dennis M. Akos, Nicolaj Bertelsen, Peter Rinder, and Soren Holdt Jensent, Software-Defined GPS and Galileo Receiver : A Single-Frequency Approach. Birkhauser: Boston, 2007, pp. 29, 83, 105. • [2] SiGe, SE4110L-EK1 Evaluation Board User Guide. • [3] SiGe, SE4110L Datasheet. • [4] Wikipedia, “Global Positioning System” [online], available from World Wide Web: <http://en.wikipedia.org/wiki/Global_Positioning- _System>. • [5] SiRF, “SiRFstarIII GSD3t” [online], available from World Wide Web: < http://www.sirf.com/products/gps_chip2e.html>.