Download
1 / 11
110 likes | 312 Views
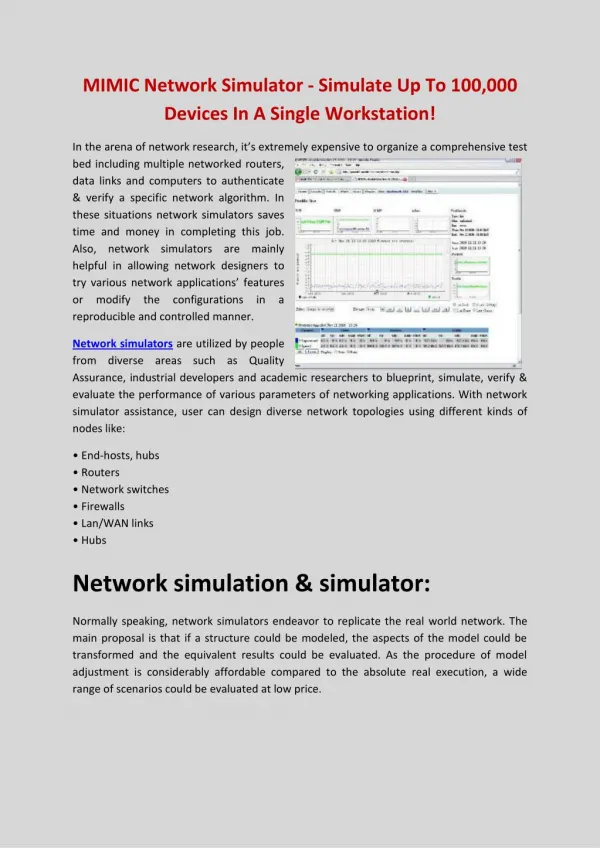
Development of Driver Simulator at LTU with CarSim. Background. Task: to develope DriverSimulators within the CASTT project to support car development in upper sweden.

E N D
Background. • Task: to develope DriverSimulators within the CASTT project to support car development in upper sweden. • Appr. 10-8 years ago this motionsimulator was constructed at LTU as a research tool in projects to improve ergonomics in forrest mashines and heavy train engines. This motionsimulator was to become the 4’th generation of motionsimulators for ergonomic and vehicle dynamic reseach at LTU since 1977. • The purpouse with this stage in the development are to adopt the motionsimulator to be used for CASTT in onroad driving situations primarily for car tests on ice and snow roads but also for medical studies of driver perfomance with disabilities or after sickness like strokes.
Overall steps of development • -1 Renovation of the motionsimulator and access to CarSim with RT and DS modules. • -2 Establishment of the development plan. • -3 Establishment of development computer. • -4 Upgrade of the control program. • -5 Establishment of collaboration server. • -6 Development of protocol ( state flow ) between the control computer and CarSim.
-1 Renovation of the motionsiulator and access to CarSim with RT and DS modules. • Relocation of units of the Motion Base platform. • Connecting, startup of the control system on the control computer. [ ref 1 and 2 ]. • Acquisition and installation of the development computer and testrun of CarSim.
-2 Establishment of the Development Plan. • Improving the control system as User Interface, etc. • Selection of protocols to transmit position signals to the motion base platform from CarSim. Will use XMPP with ejabberd see [ ref 3, 4 and 5 ]. • Preparation of Documents and collaboration server.
-3 Establishment of development computer. • Installation of Matlab, Simulink. • Installation of Visual C++.
-4 Upgrade of the control program. • Improved User Interface. • Ability to run a simulation in graphics mode only, without moving the motion platform. This is to ensure that the motions does not exceed Motionbases possible motion envelope. • Module for connecting to the control system trough primarilly UDP in comma separated floating point represented states and later using XMPP disXMP as protocol.
-5 Establishment of collaboration server. • Installing operating system Ubuntu 12 • Installing ejabberd as XMPP-disXML broker. • Installing the web application server with Plone add-on for collaboration, project and document management or Altassian Jira, Confluence and FishEye [ref 7] • Installing version control for software development. • Setup of Network Bridge between the intranet for the simulation system and the Internet.
-6 Development of protocol between the control program and CarSim. • Modification of UDP Comma separated floatingpoint defined states modules for the control system and Simulink-CarSim. • Definition of XMPP protocoll with imbedded DIS (Distributed Interactive Simulation) XML from web3d.org • Adaptation XMPP-disXML add-on in the control program. • Adaptation XMPP-disXML in Simulink - CarSimRT / DS
References • 1. User Interface, Controlling and Pre-Calculation system for motion platform http://wbsp.arb.ltu.se/wbsp-public-folders/documents-head/User-Interface-and-web-based-signal-calculation.doc • 2. Web Based Simulation Portal Presentation Conf Paper Mathworks 03http://wbsp.arb.ltu.se/wbsp-public-folders/documents-head/WBSP-Presentation-Conf-paper-matworks-03.doc • 3. Distributed Interactive Simulation http://wbsp.arb.ltu.se/filemove/local-doc/internal-documents/MU_3D • 4. XML Tactical chat ( XTC ) Extensible Messaging and XMPP in Distributed Simulation protocol.http://wbsp.arb.ltu.se/filemove/local-doc/internal-documents/MU_3D > 06Sep_Armold.pdf • 5. Erlang Jabber Server http://www.ejabberd.im/ • 6. Homepage for Motionbase on LTU: http://wbsp.arb.ltu.se/Motionbase • 7. Web servers Plone http://plone.org/ and Altassian http://www.atlassian.com/software/jira/