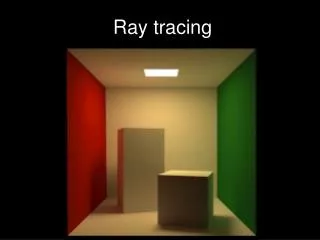
Ray Tracing
Ray Tracing. Daniel de Vasconcelos Campos. Tópicos. Problema proposto Análise do problema Algumas Técnicas Pesquisadas Algoritmo Implementado. Tópicos. Problema proposto Análise do problema Algumas Técnicas Pesquisadas Algoritmo Implementado. Problema Proposto:.

Ray Tracing
E N D
Presentation Transcript
Ray Tracing Daniel de Vasconcelos Campos
Tópicos • Problema proposto • Análise do problema • Algumas Técnicas Pesquisadas • Algoritmo Implementado
Tópicos • Problema proposto • Análise do problema • Algumas Técnicas Pesquisadas • Algoritmo Implementado
Problema Proposto: • ...” Vejam o programa de traçado de raios que comentei na aula passada. A ideia é, sem tirar sua simplicidade, torná-lo muito mais eficiente.”
Tópicos • Problema proposto • Análise do problema • Algumas Técnicas Pesquisadas • Algoritmo Implementado
Análise do problema : • Faster Intersection Tests Usually a large fraction of the compute time in ray tracing is spent in rayprimitive intersections. This was already noted in 1980 by Whitted [Whitted80],who reported 95% of his compute time to be spent on intersection computations.
Análise do problema : • Método de Intersecção de primitivas utilizado no programa : • Em “object.c”: double objIntercept( Object* object, Vector origin, Vector direction ) ->Armazena as equações dos planos , e verifica se a intersecção é interior à primitiva através de coordenadas baricêntricas.
Análise do problema : ->Não utiliza nenhuma técnica com “Spatial and Hierarchical Scene Subdivision”.
Análise do problema : • A priori, duas possibilidades de otimização levantadas: 1- Melhorar a eficiência para se computar as intersecções com as primitivas;ou 2- De alguma forma, reduzir o número de intersecções a serem computadas.(Introduzindo-se alguma técnica de estrutura de dados espacial ou de volumes envolventes ).
Tópicos • Problema proposto • Análise do problema • Algumas Técnicas Pesquisados • Algoritmo Implementado
Algumas Técnicas pesquisadas • Fast, Minimum storage Ray/Triangle Intersection [ Tomas Möller/Ben Trumbore] • Ray/Triangle Intersection with Barycentric Coordinates[Rod Bogart/J.Arenberg] • Bounding Volumes Hierarchies[4] • Kd-Trees[5]
Algoritmo levantado para otimização do programa : • Reduz significativamente o custo de armazenamento em memória , evitando armazenar as equação do plano onde está o triângulo. • Não otimiza para todos os tipos de primitivas.
Algoritmo levantado para otimização do programa : /** * Check a ray against a triangle. * Code by Thomas Akenine-Moller */ • bool Model::rayTriangleTest( const float tri[ 3 ][ 3 ], const float s[ 3 ], const float d[ 3 ], float &intersection, float &barU, float &barV ) { • // Thomas Moller's triangle intersection code • float edge1[ 3 ], edge2[ 3 ], tVec[ 3 ], pVec[ 3 ], qVec[ 3 ]; • float det, invDet, u, v, tVal; • Utils::sub3f( edge1, tri[ 1 ], tri[ 0 ] ); • Utils::sub3f( edge2, tri[ 2 ], tri[ 0 ] ); • Utils::cross( pVec, d, edge2 ); • det = Utils::dot( edge1, pVec ); • Utils::sub3f( tVec, s, tri[ 0 ] ); • if ( det > 0.0f ) { • u = Utils::dot( tVec, pVec ); • if ( u < 0.0f || u > det ) return false;
Algoritmo levantado para otimização do programa : • return false; • } else • return false; • invDet = 1.0f / det; • tVal = Utils::dot( edge2, qVec ) * invDet; • if ( tVal >= m_epsilon ) { • intersection = tVal; • barU = u * invDet; • barV = v * invDet; • return true; • } • return false; • }
Bounding Volumes • “A bounding volume is a simple geometric primitive (usually a box or a sphere) that can be intersected very quickly. If a ray misses the bounding volume (which can be checked quite cheaply), it does not have to be intersected with the complex primitive at all. Only rays hitting the bounding volume have to be checked also against the original primitive”[4]
Bounding Volumes /** * Generate the bounding boxes for each object. */ void Model::generateBounds() { for( int objectIndex = 0; objectIndex < m_numObjects; objectIndex++ ) { float *bounds = m_objects[ objectIndex ].m_bounds; float *vertices = m_objects[ objectIndex ].m_vertices; Utils::setf3( bounds, vertices ); Utils::setf3( &bounds[ 3 ], vertices ); // Set bounds to be exactly the first vertex for( int i = 1; i < m_objects[ objectIndex ].m_numVertices; i++ ) { if ( bounds[ 0 ] > vertices[ i * 3 ] ) bounds[ 0 ] = vertices[ i * 3 ]; if ( bounds[ 1 ] > vertices[ i * 3 + 1 ] ) bounds[ 1 ] = vertices[ i * 3 + 1 ]; if ( bounds[ 2 ] > vertices[ i * 3 + 2 ] ) bounds[ 2 ] = vertices[ i * 3 + 2 ]; if ( bounds[ 3 ] < vertices[ i * 3 ] ) bounds[ 3 ] = vertices[ i * 3 ]; if ( bounds[ 4 ] < vertices[ i * 3 + 1 ] ) bounds[ 4 ] = vertices[ i * 3 + 1 ]; if ( bounds[ 5 ] < vertices[ i * 3 + 2 ] ) bounds[ 5 ] = vertices[ i * 3 + 2 ]; } } }
Referências • [1]Fast, Minimum storage Ray/Triangle Intersection [ Tomas Möller/Ben Trumbore] • [2]Ray/Triangle Intersection with Barycentric Coordinates[Rod Bogart/J.Arenberg] • [3]Physically Based Image Synthesis: from theory to implementation[Matt Pharr and Greg Humphreys • [4]Realtime Ray Tracing andInteractive Global Illumination[Ingo Wald]
Referências • [5]An Introductory Tutorial on Kd-trees [Andrew W. Moore]
Tópicos • Problema proposto • Análise do problema • Algumas Técnicas Pesquisadas • Algoritmo Implementado