Download
1 / 1
10 likes | 115 Views
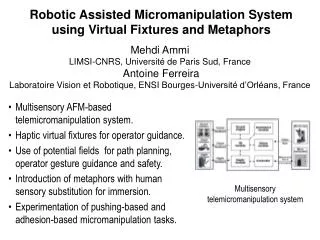
Explore a robotic-assisted micromanipulation system utilizing haptic virtual fixtures and metaphors for operator guidance and safety. This innovative approach integrates potential fields for path planning, operator gesture guidance, and sensory immersion. Witness experimentation with pushing-based and adhesion-based micromanipulation tasks, enhancing precision and control in microscale operations.

E N D
Robotic Assisted Micromanipulation System using Virtual Fixtures and Metaphors Mehdi Ammi LIMSI-CNRS, Université de Paris Sud, FranceAntoine FerreiraLaboratoire Vision et Robotique, ENSI Bourges-Université d’Orléans, France • Multisensory AFM-based telemicromanipulation system. • Haptic virtual fixtures for operator guidance. • Use of potential fields for path planning, operator gesture guidance and safety. • Introduction of metaphors with human sensory substitution for immersion. • Experimentation of pushing-based and adhesion-based micromanipulation tasks. Multisensory telemicromanipulation system