Download
1 / 12
150 likes | 488 Views
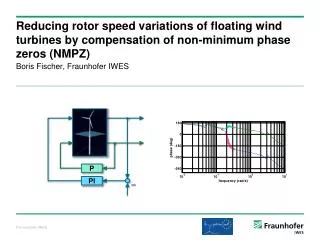
Reducing rotor speed variations of floating wind turbines by compensation of non-minimum phase zeros (NMPZ). Boris Fischer, Fraunhofer IWES. P. PI. Strategy of the pitch control system. pitch -to- feather. increased wind speed. reduced rotor thrust. In the region above rated wind speed

E N D
Reducing rotor speed variations of floating wind turbines by compensation of non-minimum phase zeros (NMPZ) Boris Fischer, Fraunhofer IWES P PI
Strategy of the pitch control system pitch-to- feather increased wind speed reduced rotor thrust In the region above rated wind speed • controller might introduce negative damping instability • strategy: “hide” nacelle motion from the controller by proper closed-loop bandwidth nacelle moves upwind
Onshore vs. floating • In the region above rated wind speed • closed-loop bandwidth < lowest relevant structural frequency • onshore: first tower bending mode • floating: first tower pitching mode • bandwidth significantly lower • Consequently, • increased variation of the rotor speed • in (Larsen and Hanson, 2007): • ±10% onshore ±30% floating • Many DFIG-designs • max. rotation speed variation = ±30% bending mode (~0.3 Hz) rigid body mode (~0.03 Hz)
Transfer function from blade-pitch to generator speed ngenerator(s) = G(s) · bblade(s) jw bblade ngenerator G(s) natural frequency of the platform pitch mode s PI : zero ndesired : pole
NMPZ limit the closed-loop bandwidth ngenerator(jw) = G(jw) · bblade(jw) bblade ngenerator G(jw) PI ndesired
Compensation of the NMPZ ngenerator(jw) = G(jw) · bblade(jw) bblade ngenerator Tgenerator vnacelle P PI ndesired • Approach introducedby:[Leithead and Dominguez, EWEC 2006]
Discussion on the control method • multivariate control design methods “include” NMPZ compensation • approach is in line with common SISO practice • readily available sensor signal: nacelle acceleration filtering • constrain demand of generator torque • integration with the supervisory control system • careful assessment of loads, especially drive train bblade ngenerator Tgenerator vnacelle P PI ndesired
Simulation study:land-based designed pitch controller on a floating turbine Benchmark system: • NREL 5MW baseline wind turbine • OC3-Hywind spar buoy • Simulationswith FAST & Matlab/Simulink Source: NREL
Example time series, 14 m/s mean wind speed reducedrotor speedvariations 30% 10% increased shafttorque
Fatigue load calculation DLC1.2 (normal operation) • 4, 6, 8, …, 24 m/s mean wind speed • metocean data according to [Jonkman, 2007] • 5 random seeds 55 runs/config. Results • DELs from rainflow count are similar, except for main shaft torsion (+50%) • drive train DELs from load duration distribution similar
Conclusion bblade ngenerator NMPZ compensation • nacelle velocity & generator torque • increased bandwidth of the blade-pitch control loop Simulation study • land-based designed pitch controller on a floating turbine • fatigue loads are similar, exception: main shaft (DEL +50%) • rotor speed variations reduced to onshore values (30%10%) Tgenerator vnacelle PI ndesired P
Thankyouforyourattention! The HiPRwindprojectreceivesfundingfromthe European Union Seventh Framework Programme (FP7/2007-2013) undergrantagreement n°256812