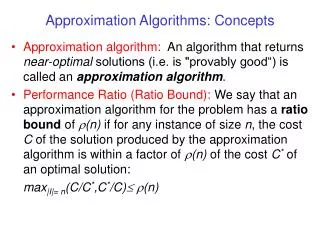
Download

1 / 29
290 likes | 372 Views
Approximation d’un contrôle optimal par un circuit électronique Y.Yakoubi et M. Lenczner Laboratoire M3M Université de Technologie de Belfort et Monbéliard, Belfort, France. Plan. Introduction Modélisation par homogénéisation Contrôle LQG Application : Plaque vibrante

E N D
Approximation d’un contrôle optimal par un circuit électronique Y.Yakoubi et M. Lenczner Laboratoire M3M Université de Technologie de Belfort et Monbéliard, Belfort, France Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Plan • Introduction • Modélisation par homogénéisation • Contrôle LQG • Application : Plaque vibrante • Approximation asymptotique de la solution de Riccati • Approximation par un circuit électronique • Résultats numériques • Conclusion • Extensions, applications. Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Introduction Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Introduction Contrôle optimal LQG Approximation au sens des hautes fréquences Construction du contrôle optimal par un circuit électronique : Calculateur distribué quasi-local Les actionneurs et les capteurs sont nombreux et distribués périodiquement : Homogénéisation Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Modélisation par homogénéisation Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Exemple de modélisation asymptotique par homogénéisation Plaque élastique encastrée avec distribution périodique d’actionneurs et de capteurs piézo-électriques Homogénéisation : il en résulte un milieu continu homogène Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Bibliographie • Homogénéisation des équations aux dérivées partielles : Bensousan A., Lions J.L. and Papanicol., 1978; Sanchez Palencia E., 1980; Allaire G., 1992; Lenczner M, 1997; Cioranescu D., Dalamian A., Griso G., 2002. • Homogénéisation des circuits électroniques : Vogelius M, 1991; Lenczner M. et Mercier D., 2004. Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Problèmes modèles • Equation du premier ordre (type chaleur) • Equation du second ordre (type ondes ou plaques vibrantes) avec conditions aux limites. Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Contrôle LQG Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Contrôle LQG Y, U et X espaces de Hilbert; A : Equation d’état et observation : générateur infinitésimal d’un semi-groupe sur X; Fonctionnelle à minimiser : Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Estimateur: Contrôle LQG Si les couples (A,B) et (C,A*) sont respectivement stabilisable et détectable alors il existe un contrôle optimal qui vaut où défini par et X=X* est l’unique solution de l’équation de Riccati où défini par et où est l’unique solution de l’équation de Riccati Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Application : Plaque vibrante Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Application : Plaque vibrante Modèle de plaque vibrante homogénéisé : où a et b sont des constantes positives. Soit cette dernière équation sous forme d’un système d’état : où et Ici Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Application : Plaque vibrante Les opérateurs adjoints de A, B et C sont définis de la façon suivante : • Remarques : • Nous avons choisi d’observer le déplacement, la vitesse sera estimée. • Le choix des espaces U et Y a pour conséquence que BB*=b²I et C*C=c²Isont des opérateurs qui ne contiennent pas des ODP. • Les solutions des deux équations de Riccati sont en fonction uniquement de l’opérateur A0. Ces solutions sont calculées exactement. • L’approximation est déduite de la solution exacte. Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Approximation asymptotique de la solution de Riccati Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Approximation asymptotique de la solution de Riccati Rappel : Soit A0 un opérateur linéaire auto-adjoint positif compact sur un espace de Hilbert X. Alors : L’ensemble des valeurs propres de A0 est fini ou dénombrable. Les valeurs propres sont réelles positives et ordonnées en une suite décroissante convergeant vers 0. Les vecteurs propres associés forment une base orthogonale complète de X. Les solutions de Riccati sont en fonction d’un opérateur linéaire auto-adjoint positif compact : L’approximation est basée sur le développement de Taylor. Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Approximation asymptotique de la solution de Riccati Les solutions approchées sont en fonction de : C’est une approximation au sens des hautes fréquences. Cette approximation se fait en dimension infinie, sans passage en dimension finie. Cette approximation conduit à un système exponentiellement stable. Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Approximation asymptotique de la solution de Riccati Les solutions approchées nous permettront par la suite de tirer les équations du contrôle de l’état et de l’estimateur : dans Avec conditions initiales et aux limites. Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Approximation par un circuit électronique Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Approximation par un circuit électronique La cascade d’équations précédentes peut être discrétisée par un schéma de différences finies. où h est le pas, sont les coordonnées. Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
+ + + - - - 1.u Construction du contrôle optimal u u ic ic ic vtt Dérivateurs électroniques capteur capteur capteur 1.vt L=1 Plaque élastique vt L=1 1.v actionneur actionneur actionneur v Construction de l’opérateur A0 : Bilaplacien Conditions Limites w Intégrateursélectroniques C=1 1. wt R0 wt R R R R R k.i k°.i k°.i Approximation par un circuit électronique Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Résultats numériques Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Résultats numériques Problème 1D, plaque 16 actionneurs/16 capteurs Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Résultats numériques Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Résultats numériques Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Conclusion Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Conclusion • La méthode d’approximation au sens des hautes fréquences d’un problème de contrôle optimal permet une implantation dans un calculateur distribué quasi-local. • La méthode ne nécessite ni la connaissance des modes propres ni la projection sur la base modale, contrairement aux approches usuelles basées sur les décompositions modales. • L’approximation est globale. • Cette méthode nous permet de faire des calculs en temps réel. Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Extensions, applications Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005
Extensions, applications • Cadre théorique beaucoup plus général pour l’approximation au sens des hautes fréquences de la solution d’une équation de Riccati. • Autres types de contrôle. Troyes , 17ième Congrès Français de Mécanique du 29 août au 2 septembre 2005