Download

1 / 2
20 likes | 116 Views
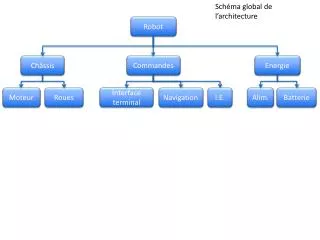
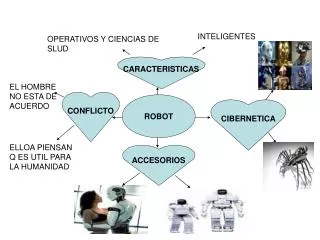
Develop a mobile robot prototype with bidirectional communication system for remote monitoring and control. Focus on adaptability to workspaces, movement paths, obstacle avoidance, and area delimitations. Implementation in electronic device for robot control card.

E N D
ROBOT PARA DESPLAZAMIENTOSDIRIGIDOS UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS INGENIERIA EN CONTROL ELECTRONICO JHON FABER GUTIERREZ F WILFREDO ENRIQUEZ L
ROBOT PARA DESPLAZAMIENTOS DIRIGIDOS PLANTEAMIENTO Armar un prototipo de robot móvil dotado con un sistema de comunicación bidireccional que le permita compartir información con una terminal remota la cual va a ejercer labores de monitoreo y control del robot. Esta terminal va a estar representada por un PC que tendrá instalado un programa que delimitara el espacio de trabajo del robot, y podrá enviar comandos y recibir datos del mismo. Nuestro enfoque esta en desarrollar un modelamiento que le permita al robot adaptarse a distintos espacios de trabajo, establecer rutas de movimiento, evasión de obstáculos y delimitaciones del área. Además, este modelamiento debe ser sintetizado en un dispositivo electrónico (DSPIC, FPGA, PSOC, u otro), para ser instalado en la tarjeta de control del robot.