Download
1 / 26
260 likes | 293 Views
Automatic Road Feature Recognition and Extraction from Remote Sensing Imagery. E.F. Granzow Iguana Incorporated & David Fletcher Geographic Paradigm Computing -------------------------------. Presentation Overview. Research Context Basic Approach The IPaver Toolkit An Example

E N D
Automatic Road Feature Recognition and Extraction from Remote Sensing Imagery E.F. Granzow Iguana Incorporated & David Fletcher Geographic Paradigm Computing -------------------------------
Presentation Overview • Research Context • Basic Approach • The IPaver Toolkit • An Example • Findings and Reflections
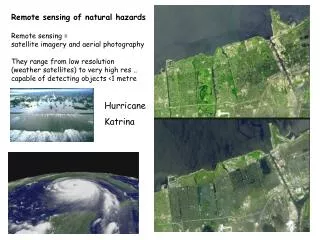
Research Context • White paper prepared as resource document for NCRST - Safety, Hazards and Disaster Assessment • Research and software developed as part of NASA supported ARC project “Development and Automation of High Resolution Image Extraction Methodologies for Transportation Features”
Research Context Problem Statement • Feasibility of automating extraction of transportation features and potential degrees of automation • Development and use of microcomputer based and specially developed software in component environment • Economic rationale for commercial applications in this area
Basic Approach Key Concepts • Roadway network considered as single object in feature identification process • Image elements regarded in terms of estimated probability of inclusion in solution set • A priori assumption elements are not part of road network object • Approach has roots in pattern recognition and computer vision
Basic Approach Key Concepts (Continued) • Based on user directed iterative application of tools • Provides immediate feedback on progress • Scaled for interactive usage
Basic Approach Roadway Network as Object - Benefits • Flexible Problem/Image Segmentation • Processing Efficiencies • Global/Reusable Classification/Processing Model
The IPaver Toolkit Functions • Recomputes DNs based on mean and offsets into n equally spaced classes • Merges two images with user specified weightings • Calculates given statistic for specified kernel and replaces kernel DN with value • Deletes image features based on a combination of size and morphology
The IPaver Toolkit Functions (continued) • Identifies and eliminates tenuous connections between features based on pixel strings of varying types • Uses pixel distance map to develop single string representation of linear features • Uses width/member seeds to trace and draw road elements
The IPaver Toolkit Support Software • IguanaSpace- Implements custom IPaver interface and parameter management • ScionImage- Implements macro procedures to view images and produce DM and seed files • IParse- Tiles images to specified size and overlap • Evidence- For known solution reports false and true positives and negatives
IPaver Interface (IguanaSpace) • Supports both menu and flowchart access to the IPaver toolkit • Allows direct editing of each function’s input options and parameters through windows dialogs • Automatically logs program states and sequences for review and reuse • Will easily accepts changes/additions to IPaver
IPaver … An Example 1 Meter resolution USGS DOQ Residential Area Central Albuquerque Panchromatic (0-255) 1/2 square km
IPaver … An Example Classification by Road Material Type Parameters DN Mean - 135 Group Interval - 15 Number of Groups - 4
IPaver … An Example Statistical Projection in 3x3 Kernel Neighborhood Parameters Statistic - Std Deviation Kernel Size - 3
IPaver … An Example Merging two images Parameters Weight I1 - 1.0 Weight I2 - 1.0
IPaver … An Example Deletion with Morphological Constraints Parameters Max Object Size - 300 Max H/W Object Size - 1500 Min H/W Ratio - .8
IPaver … An Example String Filtering Parameters Type - cul-de-sac DN Threshold - 255 Cul-de-sac depth - 2 pixels
IPaver … An Example Centerline Development from Distance Map Parameters None
IPaver … An Example Road Edge Tracing In development … Uses seed to identify both “essential line” and road edge Constrains trace based on degree of curvature and aberrant section length Controls degree of deviation between EL and road edge path Uses DM based and “source” image together
IPaver … An Example Superimposition of Solution on Base Image Parameters None
Findings & Reflections The Evidence Model Model was developed to measure success in delineating image elements both within and outside the travelway Solution template was developed by hand for 256x256 image thumbnail and compared on pixel by pixel basis to IPaver derived solution Evaluation phrased as true and false postives and negatives
Findings & Reflections The Evidence Model (Continued) image size is '65536' total road rasters '9517' percent of image '14.5' total true positives '7219' ; pp/tp '75.9' total true negatives '53621' ; nn/tn '95.7' total false positives '2398' ; fp/tn ' 4.3' total false negatives '2298' ; fn/tp '24.1' total efficiency '71.6'
Findings & Reflections Project Conclusions - Technical • It is possible to automate portions of the transportation feature recognition and extraction process • It’s feasible to do this without use of “legacy” commercial products (i.e. ERDAS Imagine) and large scale hardware • The probable minimum spatial resolution for IPaver is probably about 1 meter
Findings & Reflections Project Conclusions - Economic • Our original conclusion to not pursue commercial options may be obsolete • New interest and funding for transportation feature and centerline extraction may present new commercial potentials • Changes/evolution of image provider licensing policies have enhanced these potentials • Spaceborne imagery’s near total reliance on defense applications and procurements creates continuing commercial uncertainties
Findings & Reflections Some General Observations • New multi- and hyperspectral high resolution imagery offers avenues to enhance the extraction process • Urban scenes present greatest challenges due to oblique shadow effects of urban canyons and other urban specific issues • Likely applications are for suburban/rural high growth and unmapped areas