Download
1 / 24
260 likes | 400 Views
A Search-Classify Approach for Cluttered Indoor Scene Understanding. Liangliang Nan 1 , Ke Xie 1 , Andrei Sharf 2. 1 SIAT , China 2 Ben Gurion University, Israel . Digitalization of indoor scenes. Indoor scenes from Google 3D Warehouse. Acquisition of indoor scenes. Goal.

E N D
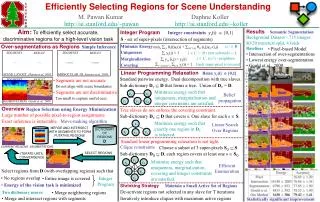
A Search-Classify Approach for Cluttered Indoor Scene Understanding Liangliang Nan1, Ke Xie1, Andrei Sharf2 1 SIAT, China 2 Ben Gurion University, Israel
Digitalization of indoor scenes Indoor scenes from Google 3D Warehouse
Goal • Scene understanding
Challenges • Clutter • Densely populated • Arbitrary arrangements • Partial representation • Occlusions • Complex geometry
Classification & Segmentation • Two interleaved problems • What are the objects? • Where are the objects? • Chicken-egg problem • Classification needs segmentation • Segmentation needs a prior
Our solution • Search • Propagate / accumulate patches • Classify • Query classifier to detect object
Related Work • Indoor scenes (This Session) • [Fisher et al. 2012] [Shao et al. 2012] [Kim et al. 2012] • Semantic relationship • [Fisher et al. 2010, 2011] • Recognition using depth + texture (RGB-D) • [Quigley et al.2009], [Lai and Fox 2010] • Outdoor classification • [Golovinskiyet al. 2009] • Semantic labeling • [Koppulaet al. 2011] Controlled region growing process
Our search-classify idea 0.6 0.8 0.92 0.94 0.94 0.94
Method overview Training Search-Classify
Point cloud features • Height-size ratio of BBox • Aspect ratio of each layer • Bottom-top, mid-top size ratio • Change in COM along horizontal slabs Bh Bd Bw
Classifier • Handle missing data • Occlusion • Random decision forest • Efficient multi-class classifier • Trained with both scanned and synthetic data • Manually segmented and labeled • 510 chairs • 250 tables • 110 cabinets • 40 monitors etc. [Shottonet al. 2008, 2011]
Search-Classify • Starts from seeds • Random patch triplets • Remove seeds with low confidence • Accumulating neighbor patches • Highest classification confidence • Stop condition • Steep decrease in classification confidence 0.65 0.92 0.93 0.88 Seed
Segmentation refinement by template fitting • Segmented - classified objects problems • Overlap, outliers, ambiguities etc. • Refinement • Outliers = patches with large distance
Template deformation • Different styles for each class • Predefined scalable parts • Templates can deform [Xuet al. 2010]
Template deformation • Different styles for each class • Predefined scalable parts • Templates can deform [Xuet al. 2010]
Fitting via template deformation • Best matching template • One-side Euclidean distance from points to template Confidence Fitting error Best fitting
Results and discussion • Scalability test with varied object density 0 (25) 1 (45) 5 (60)
Results and discussion Lai et al. 2011 • Comparison Ours
Limitation • Upward assumption • Features • Template fitting
Future work • Contextual information