Download
1 / 1
90 likes | 334 Views
Implementation of a Slip Reduction Algorithm for Electric Powered Wheelchairs Zane Hintzman 1 , BS in progress, Jorge Candiotti 1 , BE, Hongwu Wang 1 , PhD, Oscar Chuy 2 , PhD, Rory A. Cooper 1 , PhD 1 Human Engineering Research Laboratories (HERL), University of Pittsburgh, Pittsburgh, USA

E N D
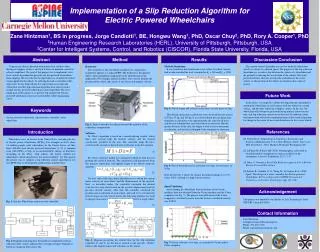
Implementation of a Slip Reduction Algorithm for Electric Powered Wheelchairs Zane Hintzman1, BS in progress, Jorge Candiotti1, BE, Hongwu Wang1, PhD, Oscar Chuy2, PhD, Rory A. Cooper1, PhD1Human Engineering Research Laboratories (HERL), University of Pittsburgh, Pittsburgh, USA 2Center for Intelligent Systems, Control, and Robotics (CISCOR), Florida State University, Florida, USA Discussion/Conclusion Abstract Method Results The smooth control algorithm was used to make the wheelchair slowly accelerate to a desired speed. The purpose of the slip reduction algorithm was to reduce slip between the wheels of a wheelchair and the ground by reducing the acceleration of the wheels. The study presented did not take into account the orientation of the caster wheels, or the position of the wheels in relation to the center of gravity. Commercial electric-powered wheelchairs lack stability when driving on slippery surfaces, and lack features to maintain control in adverse conditions. The goal of this project was to implement a low level control algorithm that prevents electric-powered wheelchairs from slipping. The key idea for the algorithm was to indirectly reduce torque applied to the wheels by reducing desired acceleration when slip occurs. It was believed that less slip would occur when the wheelchair used the slip reduction algorithm than when it used a normal electric-powered wheelchair control algorithm. The over-riding goal of this project is to prevent slip and provide electric-powered wheelchair users increased mobility while maintaining safety. MatLab Simulation: It was found that the desired and actual values for wheel velocity and acceleration had the least variation for Kp = 100 and Kd = 1500. Fig. 5: Plot of torque and velocity versus time, for user mass of 0 kg. The desired and actual accelerations were observed for user masses of 50 kg, 75 kg, and 100 kg. It was observed that the maximum and minimum accelerations were approximately the same for all users, and all users exhibited the same behavior of acceleration. But the greater the mass of the user, the longer it took to rise to maximum acceleration, and the later it dropped to the minimum acceleration. Fig. 6: Plot of desired/actual acceleration over time, for user mass of 50 kg. Note that for Fig. 5 and 6, the surface friction percentage was 10%, where 100% referred to a high traction surface. Speed Validation: After running the wheelchair forward in front of the Vicom machine, data was obtained from the Vicom machine and the Cobra computer (see Fig. 7). The percent error difference of the Cobra computer's calculated velocity from the Vicom's calculated velocity was 0.825%. Fig. 7: Plot of velocities over time, as recorded by Vicom and by Cobra computer. Hardware: The controller of the wheelchair included core components required to operate as a typical EPW. The hardware is designed to allow various peripheral components to be added based on the application. For example, optical encoders were used to monitor the position of the wheel and convert it into linear and angular velocity. Fig. 3: Smart Controller box that performed the majority of the controller's computations. Software: Dr. Chuy's algorithm is based on a smooth driving control, which takes into account both the desired velocity and the desired acceleration specified by the user. The controller maps the force exerted on the joystick to desired wheel velocities using the equation (1) Dr. Chuy's reference model was simulated in MatLab with the user pushing the joystick forward. The simulation used parameters from this project's wheelchair, and applied torque to the wheels using the equation (2) The first step of the slip control algorithm was to obtain the current linear velocity of each wheel, and the displacement of the joystick. Next, as described earlier, the controller calculated the desired velocities for each wheel based on the joystick displacement and the previous desired velocity. After that, the controller calculated the position and acceleration of each wheel, and used (2) to calculate the desired torque on each wheel. Lastly, the following formula was used to change torque into voltage that controls the speed of a single wheel (3) Fig. 4: Diagram presenting the control flow for the slip reduction controller. Fx and Fy are the forces exerted on the joystick. “Robot” refers to the output torques and velocities on the wheels. Future Work In the future, it is hoped to validate the slip reduction algorithm by running the wheelchair on a flat surface with one wheel on a rough surface, and the other wheel on a slippery surface. In this test, the wheelchair will attempt to go forward using normal control on one trial, and slip reduction control on another trial. In addition, future experimentation will involve implementation of the control algorithm for change in the center of mass and disturbance in free caster wheels. Keywords electric powered wheelchair, slip reduction, controller, smart wheelchair References Introduction [1] United States. Department of Commerce. Economics and Statistics Administration. U.S. Census Bureau. (2012). Americans With Disabilities: 2010. Matthew W. Brault. Washington, DC. [2] LaPlante M, & Kaye HS (2010). Demographics and trends in wheeled mobility equipment use and accessibility in the community. Assistive Technology, 22(1): 3-17. [3] Chuy, O. Dynamics-Based Slip Reduction Approach for a Robotic Electric Powered Wheelchair. [4] Salatin, B., Grindle, G. G., Wang, H., & Cooper, R. A. (2008, April). The design of a smart controller for electric powered wheelchairs. In Proceedings of the IASTED International Conference on Assistive Technologies (pp. 133-138). Wheelchair use is on the rise in the United States, including the use of electric power wheelchairs (EPWs). For example, in 2010, about 3.6 million people used wheelchairs in the United States; of that, about 400,000 used electric powered wheelchairs [1, 2]. A common issue with EPWs is slip, or an uncontrollable change of direction. According to Dr. Chuy, “slip reduces the lateral stability...for wheelchairs, which already have low lateral stability” [3]. The goal of this project was to validate a slip reduction control algorithm in our own EPW (Fig. 1) developed in collaboration with Dr Chuy. Fig. 1: Quickie Wheelchair used to test the controller. Fig. 2: Diagram indicating how the hardware components interact with each other. Arrows indicate flow of output to input. Diagram is based on a diagram from source [4]. Acknowledgement This project was funded by the Quality of Life Technology Center NSF ERC Grant #0540865. Contact Information Zane Hintzman Computer Science BS (in progress) Phone: 303-258-3136 Email: zane.hintzman@gmail.com