Approximation algorithms for geometric intersection graphs
Explore theoretical aspects of approximation algorithms for geometric intersection graphs, including definitions, techniques, and shifting strategies for optimization problems. Learn about PTAS, independent set, greedy algorithms, and better analysis methods. Projects include terrain guarding, unit disc cover problems, and more. Discover applications in wireless networks, map labeling, and beyond.

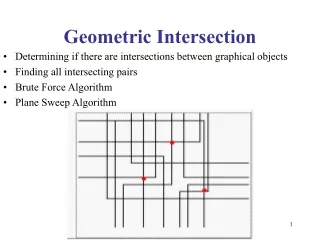
Approximation algorithms for geometric intersection graphs
E N D
Presentation Transcript
Approximation algorithms for geometric intersection graphs Class 9: theoretical aspects of geometric graphs approximation algorithms.
Class 9 - agenda: • Projects: • Who does what? • Cross-projects cooperation? • Status? • Approximation algorithms for geometric intersection graphs
Projects Projects: • Detailed project prop. • Presentation (class 11-12)
Projects • List: • Yossi – Guarding 2.5D Terrains • Itay – Watersheds, water flow simulating • Liad – Terrain Simplification (fft ...) • Yael, Ben – Unit disc cover problems • Yoav – Visibility Graph 1.5 Terrain • Yael, Ori – Vehicle Routing Problem
Projects • List: • Ronit, Inbar, Anat -Tetrix original problem • Boris, Amir –Tetrix (scheduler frame builder) • Elior –Tetrix (breaking the packets) • Yonni –Tetrix – Scheduler • Eldan, Ilan – Terrain guarding • Yossi - Terrain guarding
Ex3: • Good, lots of work. • Wide range of results: • Single tower: • guarding solutions: • Runtime: factor of 100 and more! • Memory usage: • Testing Ex3, re-grading
Approximation algorithms for geometric intersection graphs (by Paz Carmi)
Outline • Definitions • Problem description • Techniques • Shifting strategy
Definitions • Intersection graph • Given a set of objects on the plane • Each object is represented by a vertex • There is an edge between two vertices if the corresponding objects intersect • It can be extended to n-dimensional space • Applications [4] • Wireless networks (frequency assignment problems) • Map labeling • ……
Definitions • Intersection graphs (cont.) • Examples: Geometric representation Intersection graph
Definitions • ρ-approximation algorithm for optimization problems • Runs in polynomial time • Approximation ratio ρ • Min: Approx/OPT ≤ρ • Max: OPT/Approx ≤ρ • PTAS: Polynomial Time Approximation Scheme • Is a class of approximation algorithms • ρ = 1 + εfor every constant ε> 0
Problem description • A unit disk graph is the intersection graph of a set of unit disks in the plane. • We present polynomial-time approximation schemes (PTAS) for the maximum independent set problem (selecting disjoint disks). • The idea is based on a recursive subdivision of the plane. It can be extended to intersection graphs of other “disk-like” geometric objects (such as squares or regular polygons), also in higher dimensions.
Independent Set • Maximum Independent Set for disk graphs • Given a set S of disks on the plane, find a subset IS of S such that for any two disks D1,D2IS, are disjoint • |IS| is maximized. • We are given a set of unit disks and want to compute a maximum independent set, i.e., a subset of the given disks such that the disks in the subset are pairwise disjoint and their cardinality is maximized.
Independent set We will start with simple greedy-type algorithm 0 1 2 3 4 5 6 7 8
Independent set We will start with simple greedy-type algorithm 0 1 2 3 4 5 6 7 8
Independent set We will start with simple greedy-type algorithm 0 1 2 3 4 5 6 7 8
Independent set greedy-type algorithm: approximation factor? How bad can a greedy pick be? Let Sopt be the optimal solution, what is the maximal number of elements from Sopt which can intersect a single unit disk? Worst case analysis:
Independent set greedy-type algorithm: approximation factor 5: Proof: Sopt is an independent set, therefore the maximal number of elements from Sopt which can intersect a single unit disk is 5 Better algorithm better analysis
Independent set Can we improve the greedy algorithm? 0 1 2 3 4 5 6 7 8
PTAS Running time Ratio What is known? (Using shifting strategy) • Max-Independent Set • Unit disk graph (UDG): nO(k) 1/(1-2/k) • Weighted disk graph (WDG): nO(k2) 1/(1-1/k)2 • Min-Vertex Cover • UDG: nO(k2) (1+1/k)2 • WDG: nO(k2) 1+6/k • Min-Dominating Set • UDG: nO(k3) (1+1/k)2 • WDG:???? ρ
Independent set We start by simple intuition 0 1 2 3 4 5 6 7 8
Independent set We start by simple intuition 0 1 2 3 4 5 6 7 8
Independent set We start by simple intuition 0 1 2 3 4 5 6 7 8 K1: the squares of OPT on even lines. K2: the squares of OPT on odd lines. OPT= k1+k2
Shifting strategy • Ideas: • Partition the plane using vertical and horizontal equally separated lines • Number vertical lines from bottom to top with 0, 1, … • Given a constant k, there is a group of vertical (horizontal) lines whose line numbers≡ r(mod k) and the number of disks that intersect those lines is not larger than 1/k of total number of disks.
Shifting strategy • Example for unit disk graph: k = 3 0 1 2 3 4 5 6 7 8
Shifting strategy • Example
Shifting strategy • We can solve each strip independently. • Let assume we can solve each strip. • Let Aibe the value of the solution of shift i. • Let OPT denote the optimal solution. • Let OPTibe the disks of OPT intersecting active lines in shift i. • OPT = OPT1+ OPT2+ …+OPTk
Shifting strategy • Example
Shifting strategy • For each pair of integers ( i , j ) such that 0 ≤i, j < k Let Di,jbe the subset of disks obtained by removing all disks that intersects a vertical line at x = i + kp (p is integer) and horizontal line at x = j + kp (p is integer) • We left with disjoint squares of side length k • One square can contain at most O(k2) disks.
Shifting strategy • The Cardinality of the solution output is at least (1 – 2 / k ) OPT • Each disk intersects only one horizontal line and one vertical line. • There exists a value of i such that at most OPT/k disks in OPT intersects vertical lines x = i + kp Similarly, there is a value of j such that at most OPT/k disks in OPT intersects horizontal lines x = j + kp • The set Di,jstill contains an independent set of size at most (1 – 2 / k ) OPT.
Shifting strategy • Our algorithm computes a maximum independent set in each Di,j the largest such set must have cardinality at least (1 – 2 / k ) OPT • For given ε > 0 we choose k = ┌2/ ε┐to obtain (1 – ε) OPT • The running time is |D|O(k2)
Problem description • Min-Dominating Set for disk graphs • Given a set S of disks on the plane, find a subset DS of S such that for any disk DS, • D is either in DS, or • D is adjacent to some disk in DS. • |DS| is minimized. • Whether MDS for disk graph has a PTAS or not is still an open question. In my project, I first assume it exists, and then try to find a PTAS using existing techniques.
References • [1] B. S. Baker, Approximation algorithms for NP-complete Problems on Planar Graphs, J. ACM, Vol. 41, No. 1, 1994, pp. 153-180 • [2] T. Erlebach, K. Jansen, and E. Seidel, Polynomial-time approximation schemes for geometric intersection graphs, Siam J. Comput. Vol. 34, No. 6, pp. 1302-1323 • [3] Harry B. Hunt III, M. V. Marathe, V. Radhakrishnan, S. S. Ravi, D. J. Rosenkrantz, R. E. Stearns,NC-approximation schemes for NP- and PSPACE-hard problems for geometric graphs, J. Algorithms, 26 (1998), pp. 238–274. • [4] http://www.tik.ee.ethz.ch/~erlebach/chorin02slides.pdf
Next week • CG final exam examples. • Projects problems & Questions. • Shortest paths & Center Point.