
Uploaded by
ryan-gibson
1 SLIDES
103 VIEWS
10LIKES
Comprehensive Hand Kinematic Model for Finger Motion Capture
DESCRIPTION
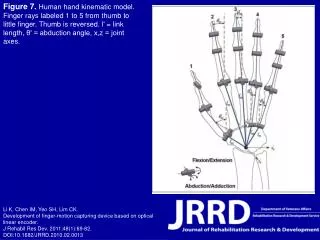
Explore a human hand kinematic model with finger rays labeled 1 to 5 from thumb to little finger. This model includes details like link length (l'), abduction angle (θ'), and joint axes (x, z) for accurate motion capture. Learn about the development of a finger-motion capturing device using an optical linear encoder.
Download
1 / 1
Download Presentation 
Comprehensive Hand Kinematic Model for Finger Motion Capture
An Image/Link below is provided (as is) to download presentation
Download Policy: Content on the Website is provided to you AS IS for your information and personal use and may not be sold / licensed / shared on other websites without getting consent from its author.
Content is provided to you AS IS for your information and personal use only.
Download presentation by click this link.
While downloading, if for some reason you are not able to download a presentation, the publisher may have deleted the file from their server.
During download, if you can't get a presentation, the file might be deleted by the publisher.
E N D
Presentation Transcript
Figure 7. Human hand kinematic model. Finger rays labeled 1 to 5 from thumb to little finger. Thumb is reversed. l' = link length, θ' = abduction angle, x,z = joint axes. Li K, Chen IM, Yeo SH, Lim CK. Development of finger-motion capturing device based on optical linear encoder.J Rehabil Res Dev. 2011;48(1):69-82.DOI:10.1682/JRRD.2010.02.0013
More Related