Jacob: Virtual Reality Instruction Agent - Pilot Project of VR Valley Twente
240 likes | 326 Views
This document details the development of "Jacob," a virtual reality instruction agent within the VR Valley Twente pilot project. Jacob's tasks include instruction, navigation, and object manipulation in a virtual world. The approach focuses on using existing knowledge and theories, with an emphasis on software engineering principles for maintainability and adaptability. The technology utilizes Java and VRML standards, allowing Jacob to run on various platforms. Current features include teaching construction tasks like Towers of Hanoi, object manipulation, and simulation of physical processes. Next steps involve enhancing natural language dialogue, intelligence, and multi-user interactions. The architecture includes layers for tasks, 3D world abstraction, and physics protocols, enabling Jacob to interact intelligently in the virtual environment. The system's design emphasizes modular schemas and instructional methods tailored to user actions. The ultimate goal is to create a versatile and intelligent virtual assistant with broad applicability.

Jacob: Virtual Reality Instruction Agent - Pilot Project of VR Valley Twente
E N D
Presentation Transcript
Jacoban instruction agent in VR Marc Evers (evers@cs.utwente.nl) 6 March 2000
Contents • context & project description • approach & technology • current state & next steps • architecture of the system • design details • conclusions
Context • pilot project of VR Valley Twente • objective: establishing a regional knowledge centre on VR • organisations: UT (INF, WB), HE, HSA, Carp, MST, ... • 6 pilot projects • http://www.vr-valley.com/
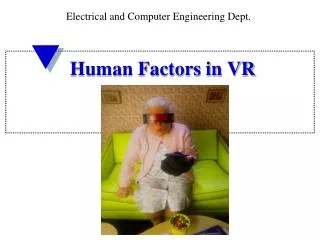
Jacob Project • Jacob as assistant • tasks: instruction, navigation, etc. • Jacob shows intelligent behaviour • multimodal interaction • interaction between multiple agents • manipulation of objects in the virtual world
Approach • use existing knowledge and theories • Intelligent Tutoring Systems, Computer Graphics, AI, … • software engineering focus • how to build such a system in a maintainable, adaptable, …, way • use OO techniques & software architecture knowledge
Technology • runs on any PC or Workstation with web browser+VRML browser+3D graphics card • programming languages • Java 1.1; VRML 97 • standards • H-Anim for Jacob’s body • under consideration: Java 3D, JavaSpeech
Current state • Jacob teaches construction task • Towers of Hanoi • manipulation of objects in virtual world • by Jacob and by user • Jacob has explicit model of the task • simulation of physical processes • gravity, collisions • simple animation
Next steps • natural language dialogue • ‘intelligence’ for Jacob • multi user Jacob (DeepMatrix) • integration in VMC, in 2 steps: • first, Jacob will play isolated role in VMC • second, Jacob interacts with VMC
Basic architecture ‘task’ layer (?) abstract 3D World: agents, cubes, tables, ... abstraction of 3D platform 3D platform: VRML/EAI; Java 3D; ...
Class VWorld • simulation of physical aspects • gravity, collisions • other physical constraints • management of VE objects • agents & objects • keeps track of the state of VE objects • observations
Class VEObject • defines general behaviour of VE objects • bounding box, position, size • gravity, (b)locking • relations like isOnTopOf
Subclasses of VEObject • Cube • detects picking, dropping, dragging by user • Avatar • knows position and orientation of user • Jacob • Jacob’s manifestation in the world • lookAt, moveObject, walktTo, shakeHead
: DraggingSensor : VWorld c : Cube : GravityThread : World NodeProxy Listener 1: drop performed 2: agentMovesObject(c) 3: enforceWorldConstraints( ) 4: startGravity( ) 5: start( ) 6: setPosition( ) 7: update( ) 8: worldStateChanged() ‘Physics’ protocol
c : Cube : VWorld : VEObject b1 : Bounding b2 : Bounding Box Box 1: setPosition(v) 2: avoidCollision(c,v) 3: avoidCollision(c,v) 4: canCollide( ) 5: getBoundingBox( ) 6: getBoundingBox( ) 7: avoidCollision(b2, v) 8: get... Collision avoidance protocol
Class Task • knows how to create the ‘scene’ • has knowledge on performing the task • Schema: hierarchical structure • Composite design pattern • action, explanation, pre/postcondition, invariant • schema interface is generic • SchemaIterator determines current task state
Class InstructionModel • InstructionRule • rules that fire other rules or start instruction methods based on conditions • InstructionMethod • executed until goal or state is reached • example: • while user does nothing: wait, give hint, wait, show move
: VWorld t : Task : Schema : Schema : Instruction Iterator Model 1: worldStateChanged( ) 2: updateCurrent( ) 3: precondition(t) 4: postcondition(t) 5: invariant(t) 6: getSubSchemas( ) 7: taskStateChanged( ) 8: currentSchema( ) Task update protocol
Concluding remarks • current results can be generalised • Jacob based on existing knowledge and theories • instruction agent concept is very general • instruction, assistance, design guidance… • demo & documentation • http://www.cs.utwente.nl/~evers/jacob/