GPS ( Global Positioning System )
GPS ( Global Positioning System ). Sistema de Posicionamento Global. GPS – Sistema de Posicionamento Global Composição. SEGMENTO ESPACIAL O sistema NAVSTAR (sigla para Nav igation S atellite T iming a nd R anging ) é constituído por 24 satélites.

GPS ( Global Positioning System )
E N D
Presentation Transcript
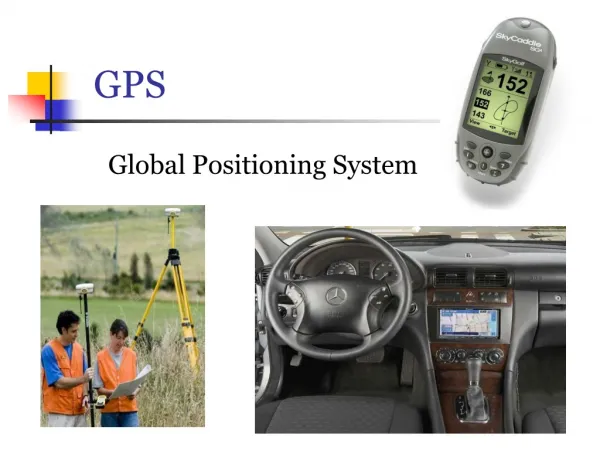
GPS (Global Positioning System) Sistema de Posicionamento Global
GPS – Sistema de Posicionamento GlobalComposição SEGMENTO ESPACIAL • O sistema NAVSTAR (sigla para Navigation Satellite Timing and Ranging) é constituído por 24 satélites. Em qualquer ponto da Terra há sempre 4 satélites visíveis.
GPS – Sistema de Posicionamento GlobalComposição SEGMENTO CONTROLO As estações de monitorização em Terra (de observação e controlo dos satélites); Fazem pequenos ajustes nos dados (posição e tempo) que os satélites GPS enviam para que a posição determinada pelos receptores seja sempre a mais precisa possível.
GPS – Sistema de Posicionamento GlobalComposição SEGMENTO DO UTILIZADOR • Os receptores de GPS que permitem: • determinar a posição do utilizador conhecendo as suas coordenadas; • Receber e descodificar os sinais dos satélites; • Trocar dados com outros receptores e com computadores; • Obter mapas detalhados ou mesmo a melhor rota para um determinado local.
GPS – Sistema de Posicionamento GlobalFuncionamento O receptor determina a sua distância ao satélite através da expressão O satélite envia um sinal, que é recebido pelo receptor, através de ondas electromagnéticas.
GPS – Usa o método geométrico da triangulação Após estimada a distância a um satélite, sabemos que nos encontramos sobre uma superfície esférica com raio igual à distância ao satélite.
GPS – método geométrico da triangulação A intersecção das superfícies esféricas obtidas a partir da determinação da distância a dois satélites é uma circunferência, o ponto poderá ser qualquer um pertencente à referida circunferência.
GPS – método geométrico da triangulação A intersecção das superfícies esféricas obtidas a partir da determinação da distância a três satélites reduz-se a dois pontos. Considerando também a Terra como uma esfera, a intersecção dos três satélites e da Terra, permitirá reduzir estes dois pontos, a apenas um.
GPS – Sistema de Posicionamento GlobalRELÓGIOS Os relógios possuem um mecanismo de produção de oscilações regulares e outro que conta as oscilações e as converte para uma unidade de tempo. Relógios mecânicos, oscilações de um pêndulo; Relógios de quartzo, oscilações de um cristal de quartzo; Relógios de atómicos, baseiam-se na frequência das radiações emitidas, ou absorvidas, por átomos ou moléculas.
GPS – Sistema de Posicionamento GlobalFuncionamento Usa-se então o 4º satélite para a sincronização dos relógios dos satélites e dos receptores GPS. O receptor de GPS corrige automaticamente, adicionando ou subtraindo tempo ao seu relógio até obter distâncias aos satélites que se intersectem num único ponto.
GPS – Sistema de Posicionamento GlobalFuncionamento O receptor sabe agora, não só a sua localização exacta sobre a Terra, mas também o tempo certo por relógios atómicos a bordo dos satélites.
GPS – Sistema de Posicionamento GlobalAplicações Os receptores de GPS são utilizados para navegação nas mais diversas actividades do Homem.
GPS – Sistema de Posicionamento GlobalAplicações Os aviões fazem a sua navegação usando receptores de GPS.
GPS – Sistema de Posicionamento GlobalAplicações Cada vez mais automóveis incorporam receptores de GPS.
GPS – Sistema de Posicionamento GlobalAplicações • localizar: localização de qualquer ponto da Terra; • navegar: navegação quer de barcos, quer de aviões; • conduzir: fornece informação precisa sobre um dado percurso; • mapear: criação de mapas mais rigorosos;
Posição e Sistemas de Referência Coordenadas Cartesianas e Coordenadas Geográficas
Posição Como podemos definir qual é a posição de um corpo?
Posição A pequena distância, falando com outra pessoa próxima, podemos apontar. Mas como podemos dizer qual é a posição?
Posição É necessário um sistema de referência ou referencial. Pode dizer-se que estão pássaros ali à esquerda da antena, mas será que uma pessoa que esteja longe deste local entende onde estão os pássaros?
Coordenadas Geográficas Para definir a posição de um corpo colocado a uma distância muito grande, podem utilizar-se coordenadas geográficas.
Coordenadas Geográficas As coordenadas geográficas são: Latitude – o valor do ângulo ao centro da terra medido entre o paralelo que passa pelo local e o equador. (0 a 90º N ou S) Longitude –o valor do ângulo ao centro da terra medido entre o meridiano que passa pelo local e o Meridiano de Greenwich para Este e para Oeste (0 a 180º E ou W). Altitude – Medida na vertical a partir do nível médio das águas do mar.
Longitude Latitude Altitude
Coordenadas Geográficas Quando dois observadores a grande distância falam um com o outro sobre uma posição que apenas um deles conhece, a forma mais simples de assinalá-la é utilizando coordenadas geográficas. Como poderá o navegador indicar pelo rádio a sua posição a uma pessoa a centenas de quilómetros de distância?
Coordenadas Geográficas Com as coordenadas geográficas, uma pessoa em qualquer local da superfície terrestre saberá qual a posição de um corpo olhando para um mapa.
Coordenadas Cartesianas Para definir a posição de um corpo colocado a uma distância relativamente pequena, podem utilizar-se coordenadas cartesianas.
Coordenadas Cartesianas René Descartes foi o primeiro a propor o sistema de coordenadas ortogonais e ortonormadas a que hoje chamamos coordenadas cartesianas.
Coordenadas Cartesianas Nas coordenadas cartesianas, os conceitos de orientação frente-trás, esquerda-direita e cima-baixo foram substituídos pelos três eixos orientados x, y e z. O sistema tem uma origem que é a posição em relação à qual se estão a marcar as coordenadas (x, y, z).
z B (xb,yb,zb) y A (xa,ya,za) x Descrição de um movimento O movimento do corpo pode ser definido de várias formas: Trajectória:é o conjunto de pontos sucessivos ocupados pelo corpo, no decurso do tempo.
Grandezas vectoriais: Deslocamento:é um vector cuja a origem é na posição inicial e a extremidade na posição final, e, representa-se por r. r Descrição de um movimento Grandezas escalares: O espaço percorrido:é o comprimento do percurso efectuado. É medido sobre a trajectória, e, representa-se por s. z B (xb,yb,zb) y A (xa,ya,za) x
z s rm = t B (xb,yb,zb) y A (xa,ya,za) x r vm = t Descrição de um movimento Grandezas escalares: Grandezas vectoriais: Rapidez média:é o espaço percorrido sobre o intervalo de tempo. velocidade média:é o deslocamento sobre o intervalo de tempo. vm
r s v= lim r= lim t t t 0 t 0 Descrição de um movimento Grandezas escalares: Grandezas vectoriais: Rapidez instantânea:é o limite para que tende o espaço percorrido, quando o intervalo de tempo tende para zero. Velocidade instantânea: é o limite para que tende o vector deslocamento, quando o intervalo de tempo tende para zero. O vector velocidade instantânea é um vector tangente a trajectória e é caracterizado por: Sentido: o do movimento Direcção: a da tangente a trajectória Módulo ou norma: v = r