Two dimensional thining
Learn about the process of image thinning, which reduces a set of black points in a digital image to a skeleton while preserving its topology. Explore concepts such as maximal balls, medial axis, simple points, and sequential deletion of simple points.

Two dimensional thining
E N D
Presentation Transcript
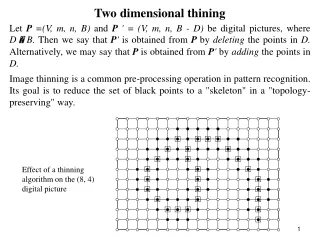
Two dimensional thining Let P =(V, m, n, B) and P ' = (V, m, n, B - D) be digital pictures, where D B. Then we say that P' is obtained from P by deleting the points in D. Alternatively, we may say that P is obtained from P' by adding the points in D. Image thinning is a common pre-processing operation in pattern recognition. Its goal is to reduce the set of black points to a "skeleton" in a "topology-preserving" way.
Maximal ball Let denote by Br(x) the ball of radius r (strictly positive integer) centred on x є Z2, defined by Br(x) = {y є Z2, d(x, y) ≤ r}, where function d:Z2→R+∪ {0} is a metric. Let assume a digital image (Z2, m, n, B). A ball Br(x) B is maximal for B if it is not strictly included in any other ball included in B. The medial axisof B, denoted by MA(B), is the set of the centres of all the maximal balls for B. Examples of balls of radiuses 1, 2, 3 respectively (city distance)
2 2 2 2 2 2 2 3 2 2 2 2 2 2 2 2 1 1 1 1 1 1 2 2 Example of medial axis [Malina 02] p. 83
Medial axis vs thining and shrinking A non-topological requirement of a thinning algorithm is that each elongated part of the input black point set should be represented by a black digital arc in the output skeleton. An algorithm which does not meet this condition, but merely deletes black points while preserving the topology of the image, is called a shrinking algorithm. Input object One iteration of thining Shrinking result Medial axis Thining result [Coup 07]
Topology preservation criterion Let P = (Z2, m, n, B) P' = (Z2, m, n, B - D)be a two-dimensional digital pictures. Then deletion of the points in a subset D of B preserves topology if and only if • each black component of P contains exactly one black component of P', and • each white component of P' contains exactly one white component of P, Example 1: (8,4) dig. pic. Example 2: (8,4) dig. pic. P P P’ P’
Topology preservation criterion Let P = (Z2, m, n, B) be a two-dimensional digital picture. Then deletion of the points in a subset D of B preserves topology if and only if • each black component of P contains exactly one black component of P', and • each white component of P' contains exactly one white component of P, where P' is the digital picture (Z2, m, n, B - D). Example 3: (8,4) dig. pic. P P’
Simple point A black point p in a two-dimensional digital picture is called a simple point if its deletion preserves topology in the sense of Criterion from the previous slide. a c b [Coup 10]
Theorem on simple points in 2D Let p be a non-isolated border point in an (8, 4) or (4, 8) digital picture. Let B be the black point set of the digital picture and let B' = B— { p}. Then p is a simple point iff: • p is adjacent to just one component of N8(p) ∩ B'. • p is adjacent to just one component of N8(p) ∩ B*, where B* = Z2 \ B Where N8(p) is a 8-neighbourhood of p. (def. in slide 7). Proof in () Let p be a non-isolated border point in an (8, 4) or (4, 8) digital picture. Then p is a simple point iff T(p) = 1 and Tb(p) = 1 Let introduce: T(p) – number of components of N8(p) ∩ B'. Tb(p) – number of components of N8(p) ∩ B* So: T(a) = Tb(a) = 1; T() = Tb() = 2;T()=0, Tb()=1 a
Sequential deletion of simple points Let P0, P1,..., Pn be a sequence of digital pictures. If for each 1 < i < n the picture Pi+1 is obtained by deleting a simple point of Pi, from Pithen we say that Pn is obtainable from P0 (or that P0 can be transformed into Pn) by sequential deletion of simple points. Important! • A simple point of Pi, need not be a simple point of P0; • A black point of Pithat is a simple point of P0 need not be a simple point of Pi
Example of sequential deletion of simple points P0 P1 P2 P3 P4 P5 P6 P7 P8 P9
Problem with parallel deletion of simple points s p q P0 P1 P2 P3 t P4 P5 P6 P7 P8 P9
Theorems about sequential deletion of simple points • Any finite (4, 8) or (8, 4) digital picture whose black point set is non-empty and connected and has no holes can be transformed by sequential deletion of simple points to a digital picture with just one black point. [Rose 70] • Finite (4, 8) digital picture whose black point set is connected and has just one hole can be transformed by sequential deletion of simple points to a digital picture whose black point set is a simple closed black curve. [Rose 73] • Finite (4, 8) and (8, 4) digital picture topology preservation in the sense of the criterion from slide 28 is equivalent to the condition that P' be obtainable from Pby sequential deletion of simple points.[Rose 98] • In any finite (4, 8) digital picture sequential deletion of simple points will eventually produce a digital picture whose black point set does not contain any 2 by 3 arrays of black points.[Alex 71] • Given two finite (4, 8) digital pictures whose black point sets are connected, and which have the same number of holes, it is possible to transform one to the other by sequential addition and deletion of simple points. [Mylo 71]
2D parallel thinning algorithms It is generally quite tricky to prove that a proposed parallel thinning algorithm satisfies the criterion from slide 28. For an example of such a proof see [Stef 71]. Unfortunately such proofs often have to be done from first principles.
Theorem on border parallel deletion of points A black point with coordinates (x, y)is said to be a north border point if the point (*, y + 1) is a white point. An end point of a two-dimensional digital picture is a black point that is adjacent to just one other black point. Theorem 2.Let P be an (8, 4) or a (4, 8) digital picture. Then (parallel) deletion of any number of simple north border non-end points of P preserves topology in the sense of criterion from slide 27. Simple north-border non-end points in an (8, 4) digital picture
Border sequential Theorem 2 obviously remains valid if "east," "south," or "west" is substituted for "north." However, the restriction that border points are deleted from just one side (north) is necessary. Simple non-end points in an (8, 4) digital picture whose parallel deletion will merge two white components q p Theorem 2 is applicable to algorithms which delete points in parallel from each side in turn (e.g., in the order N, S, E, W). Such algorithms have been called border sequential [Hild 83].
Topological characteristic of points in 2D A latice point p is: Simple point: T(p) = 1 Tb(p) = 1 (see slide 30) Interior point: Tb(p) = 0 Isolated point T(p) = 0 Curve point T(p) = 2 and Tb(p) = 2 Curve junction point T(p)=3 or Tb(p)=3 border point curve point Interior point junction point between curves Isolated point
Theorem about simple points in 3D Let X ⊆Z3 and x ∊X. K6(x, X) –number of components of N18(x) ∩ X \ {x} adjacent to x. K26(x, X) –number of components of N26(p) ∩ X \{x} adjacent to x. Let p be u non-isolated border point in an (m, n) digital picture. Let B be the black point set of the digital picture. Then p is a simple point iff Km(p, B) = 1 and Kn(p, B*) = 1, where B* = Z3 - B
T(p) = 1 N26(p)-{p} p Topological numbers T, Tb in 3D In 3D we similarly calculate T(p) and Tb(p), for a black point p and(Z3, 26, 6, B) digital image. T(p) = K26(p, B) and Tb(p) = K6(p, B*) T(p) is calculated as a number of black 26-components in N26(p) - {p}
Tb(p) = 3 N18(p) p Topological numbers T, Tb in 3D Tb(p) is calculated as a number of white 6-components in N18(p) 6-adjacent to p.
Topological characteristic of points in 3D For a 3D (26, 6) digital image a point p is: An interior point Tb(p) = 0 A isolated point T(p) = 0 A border point T(p) = 1 and Tb(p) = 1 A curve point T(p) = 2 and Tb(p) = 1 A curves junction T(p) > 2 and Tb(p) = 1 A surface point T(p) = 1 and Tb(p) = 2 A surface-curve(s) junction T(p) ≥ 2 and Tb(p) = 1 A surfaces junction T(p) = 1 and Tb(p) > 2 A surfaces-curve(s) junction T(p) ≥ 2 and Tb(p) > 2 Border points Junction between curves Junction between surfaces curve surface Junction curve-surface [Malan 10]
N26(p)-{p} p p Example Fragment of (26, 6) image. Junction between surfaces: T(p) = 1 and Tb(p) > 2 T(p) = 1 Calculation of T(p) Calculation of Tb(p) Tb(p) = 4 N18(p)