Download

1 / 81
810 likes | 1.01k Views
Geografiske informasjonssystemer (GIS) SGO1910 & SGO4930 Vår 2004. Foreleser: Karen O’Brien (karen.obrien@cicero.uio.no) Seminarleder: Gunnar Berglund (gunnarbe@student.sv.uio.no). Part I: Uncertainty. Can a Database be Perfect?. The real world is infinitely complex

E N D
Geografiske informasjonssystemer (GIS)SGO1910 & SGO4930 Vår 2004 Foreleser: Karen O’Brien (karen.obrien@cicero.uio.no) Seminarleder: Gunnar Berglund (gunnarbe@student.sv.uio.no)
Can a Database be Perfect? • The real world is infinitely complex • a perfect description would have to be infinitely large and complex • A geographic database must always approximate, generalize, abstract, or simplify • we have many ways of doing this in GIS
How Hilly is Denmark? • Denmark is relatively flat compared say to Norway, or Switzerland, or Nepal • people often think of it as flat • Suppose the “slope” attribute in a database is given the value 0 for an object representing the country of Denmark • this is a crude approximation (lowest point: Lammefjord -7 m) (highest point: Yding Skovhoej 173 m) • it is much simpler than recording the slope at 30m intervals across the country • it may be good enough for some purposes
GIS Compresses the Real World • Representations are almost always “lossy” (i.e., you lose information) • It is important to know how much loss has occurred • by measuring the difference between the data and the real world • we term this uncertainty, or the degree to which data leave us uncertain about the real world
Generalization and Fields • Many geographic phenomena are conceptualized as fields • exactly one value of the phenomenon exists at every point in space • think of elevation and land ownership as convenient examples • In principle a field can take a different value everywhere • creating an infinite amount of information • Tobler’s Law helps by virtually guaranteeing that variation will be smooth and slow over space
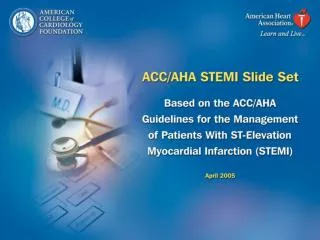
Six Ways of Representing a Field • All involve some kind of approximation or generalization • All reduce the variation of the field to a set of objects and attributes • that now look similar to phenomena conceptualized as discrete objects • but the conceptualizations are very different
A B C D E F The six approximate representations of a field used in GIS. A. Regularly spaced sample points. B. Irregularly spaced sample points. C. Rectangular cells. D. Irregularly shaped polygons. E. Irregular network of triangles, with linear variation over each triangle (the Triangulated Irregular Network or TIN model; the bounding box is shown dashed in this case because the unshown portions of complete triangles extend outside it). F. Polylines representing contours.
Map Specifications • Topographic maps are prepared by mapping agencies using specifications specific to each scale • a scale’s specification sets the rules for representing real-world features on the map • these rules involve generalization and approximation • If a map meets its specification it can be said to be perfectly accurate • even though its contents do not match the real world perfectly
Methods of generalization • McMaster and Shea (1992) define 10 distinct types of generalization • Simplification • Smoothing • Collapse • Aggregation • Amalgamation • Merging • Refinement • Exaggeration • Enhancement • Displacement
Generalization can affect a database permanently (database generalization) • or can be temporary for the purpose of display (cartographic generalization)
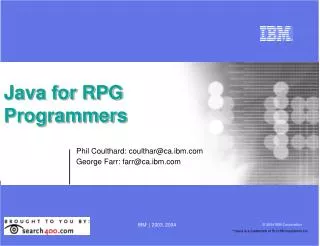
Weeding • Simplifying the shape of a line or an area by reducing the number of points in its representation • The Douglas-Poiker algorithm drops points from a polyline or a polygon • using a user-defined tolerance distance
Tolerance 4 A 1 15 3 B 2 7 The first two steps of the Douglas-Poiker algorithm. The endpoints of the polyline are first connected (A), and the point lying furthest from this line is found. If it lies further than the user-supplied tolerance distance, it is selected as a member of the simplified line, along with the two endpoints, and a new cycle of the algorithm is started. In the next cycle Points 2 and 3 lie within the tolerance of the line 1-4-15, but Point 7 does not.
In the final step 7 points remain (identified with green disks), including 1, 4, 7, and 15. No points are beyond the user-defined tolerance distance from the line.
Merging • Another common form of generalization • by aggregating adjacent areas • Small areas can be generalized by removing any that fall below a user-defined threshold • known as the Minimum Mapping Unit or MMU • such areas are merged with their most similar neighbors
Measuring the Degree of Generalization • Representative Fraction • the ratio of distance on the map to distance on the ground • also known as the scale • e.g., 1:50,000 (1 cm=50,000 cm or 500 m) • every 10 cm on the map correspond to 5 km on the ground
Scale for Digital Databases • How can a digital database have a representative fraction • if there are no distances to be measured in the database? • A system of conventions allows digital databases to have scales • e.g., use the scale of the map that was digitized or scanned to create the database
Minimum Mapping Unit • Area can be a misleading indicator of importance • e.g., a riparian zone along a stream
Spatial Resolution • The smallest distance over which change is recorded • Easily defined for raster data, but not for vector • e.g., if census reporting zones vary greatly in area, what is the spatial resolution of census data? • Resampling can create false spatial resolution • e.g., dividing every pixel into 4 does not necessarily give finer spatial resolution • spatial resolution is defined by the process of observation, not by such transformations as resampling
Example of resampling. The original cells outlined in black have been resampled to the cells outlined in red. New attributes of each cell have been assigned using the largest area rule.
Example of resampling an existing DEM to obtain a new DEM with shorter spacing between sample points. The black dots are the new DEM sample points, and the existing DEM provided mean elevations for each red square. The apparent improvement in spatial resolution as a result of resampling may not be justified.
Consequently… • Imperfect or uncertain reconciliation • [science, practice] • [concepts, application] • [analytical capability, social context] • It is impossible to make a perfect representation of the world, so uncertainty about it is inevitable
Sources of Uncertainty • Measurement error: different observers, measuring instruments • Specification error: omitted variables • Ambiguity, vagueness and the quality of a GIS representation • A catch-all for ‘incomplete’ representations or a ‘quality’ measure
U1: Conception • Spatial uncertainty • Natural geographic units? • Bivariate/multivariate extensions? • Discrete objects • Vagueness • Statistical, cartographic, cognitive • Ambiguity • Values, language
Scale & Geographic Individuals • Regions • Uniformity • Function • Relationships typically grow stronger when based on larger geographic units
Scale and Spatial Autocorrelation No. of geographic Correlation areas 48 .2189 24 .2963 12 .5757 6 .7649 3 .9902
U2: Measurement/representation • Representational models filter reality differently • Vector • Raster
0.9 – 1.0 0.5 – 0.9 0.1 – 0.5 0.0 – 0.1
Other issues • Measurements only accurate to a limited extent • ‘Continuous’ scales are in practice discrete • Discrete isopleth/choropleth map display • Choropleth mapping in multivariate cases
Measurement Error • Digitizing errors • Automated solutions • Conflation of adjacent map sheets
Data Integration and Lineage • Concatenation • E.g. polygon overlay • Conflation • E.g. rubber sheeting • Persistent error indicates shared lineage • Errors tend to exhibit strong positive spatial autocorrelation
U3: Analysis • Can good spatial analysis develop on uncertain foundations? • Can rarely correct source • More usually tackle operation (internal validation) • Conflation/concatenation allows external validation of zonal averaging effects • Aggregation & ecological fallacy
Modifiable Areal Unit Problem (MAUP) • Scale + aggregation = MAUP • can be investigated through simulation of large numbers of alternative zoning schemes • Apparent spatial distributions which are unrepresentative of the scale and configuration of real-world geographic phenomena (example: urban density
Summary • Uncertainty is more than error • Richer representations can create uncertainty! • Need for a priori understanding of data and sensitivity analysis • Spatial analysis is often context-sensitive (you need to know your data and place!)
Part II: Global Positioning Systems (GPS) Sources of information: http://www.trimble.com/gps/ http://www.colorado.edu/geography/gcraft/notes/gps/gps.html#DODSystem
GPS is a Satellite Navigation System • GPS is funded by and controlled by the U. S. Department of Defense (DOD). While there are many thousands of civil users of GPS world-wide, the system was designed for and is operated by the U. S. military. • GPS provides specially coded satellite signals that can be processed in a GPS receiver, enabling the receiver to compute position, velocity and time. • Four GPS satellite signals are used to compute positions in three dimensions and the time offset in the receiver clock.
Space Segment • The Space Segment of the system consists of the GPS satellites. These space vehicles (SVs) send radio signals from space.
Space Segment (cont) • The nominal GPS Operational Constellation consists of 24 satellites that orbit the earth in 12 hours. • The satellite orbits repeat almost the same ground track (as the earth turns beneath them) once each day. The orbit altitude is such that the satellites repeat the same track and configuration over any point approximately each 24 hours (4 minutes earlier each day). • There are six orbital planes (with nominally four SVs in each), equally spaced (60 degrees apart), and inclined at about fifty-five degrees with respect to the equatorial plane. • This constellation provides the user with between five and eight SVs visible from any point on the earth.