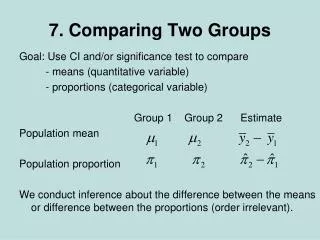
7. Continuous Groups
7. Continuous Groups. S pecial O rthogonal. Rotations in 2-D :. Rotations in 3-D :. Rotations in n -D :. ( indep. elements in n n SO matrix ). SO( n ) = Lie group of order n ( n 1)/2. { R ( ) } = Fundamental representation. Generalization to complex vector space:.

7. Continuous Groups
E N D
Presentation Transcript
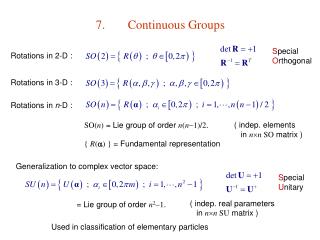
7. Continuous Groups Special Orthogonal Rotations in 2-D : Rotations in 3-D : Rotations in n-D : ( indep. elements in nn SO matrix ) SO(n) = Lie group of order n(n1)/2. { R() } = Fundamental representation Generalization to complex vector space: Special Unitary ( indep. real parameters in nn SU matrix ) = Lie group of order n21. Used in classification of elementary particles
Lie Groups & Their Generators Lie group of order n= group that is also an n-D differentiable manifold. ( group elements have local 1-1 map to region in Rn.) ~ group with continuous parameters over finite n-D region(s). For elements close to I, Sj = generators sign chosen to make S = L for the identity component of G. &
Example 17.7.1. SO(2) Generator active point of view. ( eq.17.38 is the passive version ) Rotations about a fixed axis : § 2.2, Euler identity :
SO(n) & SU(n) Sj are hermitian U unitary Let i be the eigenvalues of U : Sj are traceless
Let & multiplication is closed f j k l = structure constants Set Can be used to define “identity component” of G. ( f j k l is antisymmetric in its indices.)
rank of G = max # of mutually commuting independent generators. Basis of IRs of G are labelled using the eigenvalues of such set of generators. rank of G = # of indices needed to label the basis of an IR. E.g., SO(n) & SU(n) ~ generated by generalized angular momenta For SO(3), rank = 1 IR label = ML . For SU(2), rank = 1 IR label = MS . For SU(3), rank = 2 IR label = ( I3 , Y ) . Casmir operator= operator that commutes with all generators of G. IRs of G are labelled using the eigenvalues of the Casmir operator(s). For SO(3), L2 is the Casmir operator.
SO(2) & SO(3) For SO(2) For SO(3) §16.4 : see next page
Basis { x, y } Basis = { i , j } (active point of view) Using functions { x, y } as basis : (passive point of view) generator for V is Alternatively, QM rotation op. ( = 1 )
Example 17.7.2. Generators Depend on Basis SO(3) withY1m (Cartesian rep) as basis : Orthonormality : Similarly:
SU(2) & SU(2)-SO(3) Homomorphism # of independent real parameters for nn complex matrices : # of generators: SO(3) = 3 SU(2) = 3 SU(3) = 8 SU(2) : Rotation operator (passive) :
SU(3) p - n behaves nearly identically in strong interaction. Heisenberg :p - n is a doublet [ 2-D IR of SU(2) ] (approximate symmetry ) Isospin: Gell-Mann : is an octet [ 8-D rep of SU(3) ] Y = 2 ( Q I3) = Hypercharge S = (ns ns ) = Strangeness ns= # of strange quarks ns= # of strange antiquarks Pre-quark def: S = +1 for anti-partcle S = 1 for partcle
SU(3) : order = # of generators = 8, rank = IR labels = 2 i= Gell-Mann matrices GMMs for SU(2) subgroup: { 1 , 2, 3}, { 6 , 7, 3 }, { 4 , 5, 3 }.
Example 17.7.3. Quantum Numbers of Quarks Quark model : Basis : { u, d, s } quarks
Commutation Rules Ladder operators : Mathematica
Y V+ U+ Similarly : I+ I3
Example 17.7.4. Quark Ladders Mathematica
d (1/2 , 1/3 ) u (1/2 , 1/3 ) I (1/2 , 1 ) (1/2 , 1 ) U+ I+ V+ U+ V+ I I+ U V (1 , 0 ) (1 , 0 ) Y V U s ( 0 , 2/3 ) (1/2 , 1 ) (1/2 , 1 ) Conversion between quarks Root Diagram : Effects of operators I3
Baryons Quark model: Each baryon consists of 3 quarks. # of basis functions = 3 3 3 = 27 Decomposing into IR bases : 27 = 10 + 8 + 8 + 1 Rep : Short hand : Standard tool for the task is the Young tableaux (see Tung). Here, we’ll use the ladder operators ( see root diagram ).
Example 17.7.5. Generators for Direct Products Group operation on products of basis functions : i.e., group elements generators Lie group Lie algebra e.g., Short hand :
shorthand: uuuhas I3 = 3/2. uudhas I3 = 1/2. dsshas Y = 1.
Example 17.7.6. Decomposition of Baryon Multiplets ( I3 , Y ) values of the 27 possible 3-quark products :
Baryon decuplet : generated fromuuu. Baryon Octet : generated from [duu]. Mathematica [...] means appropriate symmetrized linear combination of ... .
Mass Splitting Particles in a multiplet actually have slightly different masses ( SU(3) symmetry only approximate ). This is caused by the weak & EM forces that break the symmetry of the strong force.
Inertial system: System travelling with constant velocity w.r.t. a standard reference system (the distant stars). 8. Lorentz Group Physical laws should be the same for all observers. Mathematically, this means equations of physical laws must be covariant, i.e., General relativity : Their forms are unchanged under any space-time coordinate (observer) transformations. Special relativity : Their forms are unchanged under any transformations between moving inertial space-time coordinate systems (observers). ( Lorentz transformations ; Lorentz group ) Galilean relativity : Their forms are unchanged under any spatial coordinate transformations between moving inertial systems (observers) Transformations between stationary inertial systems: Translational invariance Conservation of (linear) momentum Rotational invariance Conservation of angular momentum
Homogeneous Lorentz Group Lorentz transformations : Transformations of space-time coordinates between moving inertial systems. Space-time is homogeneous & isotropic symmetries in coordinate transformations Lorentz transformations ~ (homogeneous) Lorentz group Lorentz transformations + space-time translations Inhomogeneous Lorentz group ( Poincare group ) ~
Special relativity : Space-time = linear 4-D space with Minkowski metric. ( This makes velocity of light = c for all inertial observers ) event interval Same event as recorded by observer travelling with velocity v Lorentz group : All transformations that keep Let xbe moving in +z direction with small velocity v : a indep of v. small vonly
Generator for z-boost Operator for z-boost Comparing with the actual z-boost : = rapidity
Successive Boosts , not , is the group parameter Successive boosts in different directions give boost + rotation Thomas precession ( crucial in SO coupling )
Example 17.8.1. Addition of Collinear Velocities Successive z-boosts: Resultant velocity: , 0 & finite
Minkowski Space Metric tensor : Boost
9. Lorentz Covariance of Maxwell’s Equations Let SI units see E.g.4.6.2
Lorentz Transformation of E & B Mathematica
Example 17.9.1. Transformation to Bring Charge to Rest Charge q moving with velocity v is at rest in frame boosted by v. In boosted frame In original frame Lorentz force
10. Space Groups Perfect crystal = basis of atoms / molecules placed on each point of a Bravais lattice. Bravais lattice = points given by hi= unit lattice vectors For d = 3 , there’re 14 possible Bravais lattices, & 32 compatible crystallographic point groups, which give rise to 230 space groups.