Download
1 / 6
60 likes | 161 Views
5.1 动态规划的最优化原理及其算法 5.1.1 求解多阶段决策过程的方法 例 5.1.1 最短路问题. 决策树法. 可以枚举出 20 条路径,其中最短的路径长度为 16. 例 5.1.1 最短路问题. 表现为明显的阶段性 一条从 A 到 B 的最短路径中的任何一段都是最短的. 因此我们可以从 B 向回搜索最短路 标记法 如何找出最短路径. 最优性原理 “最优策略的一部分也是最优的” 每步的决策只与相邻阶段状态有关,而与如何达到这一状态无关. 5.1.2 动态规划的基本概念及递推公式. 状态 ( 每阶段初始的出发点 )

E N D
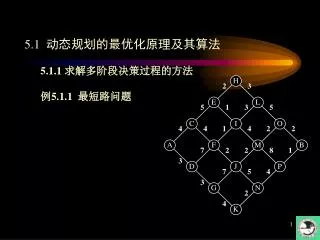
5.1动态规划的最优化原理及其算法 • 5.1.1 求解多阶段决策过程的方法 • 例5.1.1 最短路问题
决策树法 可以枚举出20条路径,其中最短的路径长度为16
例5.1.1最短路问题 • 表现为明显的阶段性 • 一条从A 到B 的最短路径中的任何一段都是最短的 • 因此我们可以从B向回搜索最短路 • 标记法 • 如何找出最短路径 最优性原理 “最优策略的一部分也是最优的” 每步的决策只与相邻阶段状态有关,而与如何达到这一状态无关
5.1.2 动态规划的基本概念及递推公式 • 状态(每阶段初始的出发点) • 最短路问题中,各个节点就是状态 • 生产库存问题中,库存量是状态 • 物资分配问题中,剩余的物资量是状态 • 控制变量(决策变量) • 最短路问题中,走哪条路 • 生产库存问题中,各阶段的产品生产量 • 物资分配问题中,分配给每个地区的物资量 • 阶段的编号与递推的方向 • 一般采用反向递推,所以阶段的编号也是逆向的 • 当然也可以正向递推
动态规划的步骤 1、确定问题的阶段和编号 2、确定状态变量 • 用 Sk表示第 k 阶段的状态变量及其值 3、确定决策变量 • 用 xk表示第 k 阶段的决策变量,并以 xk*表示该阶段的最优决策 4、状态转移方程 sk-1= g(sk, xk) 反向编号 sk+1= g(sk, xk) 正向编号 5、直接效果 • 直接一步转移的效果 dk(sk, xk) 6、总效果函数 • 指某阶段某状态下到终端状态的总效果,它是一个递推公式
动态规划的步骤 • hk是一般表达形式,求当前阶段当前状态下的阶段最优总效果 (1) 如最短路问题,是累加形式,此时有 • 终端的边际效果一般为 f0(s0, x0)=0 • (2)如串联系统可靠性问题,是连乘形式,此时有 • 终端的边际效果一般为 f0(s0,x0)=1 • 从第1阶段开始,利用边际效果和边界条件,可以递推到最后阶段