Shape Histograms for 3D Model Representation and Retrieval
This paper explores the concept of shape histograms as a descriptor for 3D models, detailing how shapes can be represented and compared using boundary voxel representation. It presents a voxel grid that indicates intersections with model boundaries, allowing for effective retrieval processes across various model types, including point clouds and closed meshes. The study addresses challenges in histogram comparisons, emphasizing solutions through quadratic distance forms and Gaussian convolution, ultimately maintaining essential high-frequency information for accurate shape analysis.

Shape Histograms for 3D Model Representation and Retrieval
E N D
Presentation Transcript
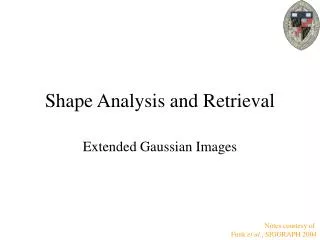
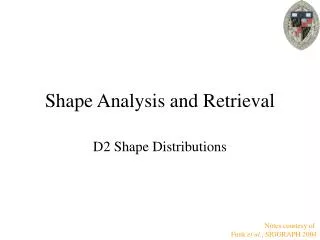
Shape Analysis and Retrieval Shape Histograms Ankerst et al. 1999 Notes courtesy of Funk et al., SIGGRAPH 2004
Shape Histograms • Shape descriptor stores a histogram of how much surface resides at different bins in space Model Shape Histogram (Sectors + Shells)
Boundary Voxel Representation • Represent a model as the (anti-aliased) rasterization of its surface into a regular grid: • A voxel has value 1 (or area of intersection) if it intersects the boundary • A voxel has value 0 if it doesn’t intersect Model Voxel Grid
Boundary Voxel Representation • Properties: • Invertible • 3D array of information • Can be defined for any model Point Clouds Polygon Soups Closed Meshes Genus-0 Meshes Shape Spectrum
Histogram Representations • Challenge: • Histogram comparisons measure overlap, not proximity.
Histogram Representations • Solution: • Quadratic distance form:
Histogram Representations • Solution: • Quadratic distance form: M is a symmetric matrix and can be expressed as:O is a rotation and D is diagonal with positive entries. Taking the square root:
Histogram Representations • Solution: • Quadratic distance form factors: If v=(v1,…,vn), we have: That is, M1/2(v) is just the convolution of v with some filter.
Convolving with a Gaussian • The value at a point is obtained by summing Gaussians distributed over the surface of the model. • Distributes the surface into adjacent bins • Blurs the model, loses high frequency information Surface Gaussian Gaussian convolved surface
Gaussian EDT • The value at a point is obtained by summing the Gaussian of the closest point on the model surface. • Distributes the surface into adjacent bins • Maintains high-frequency information max Gaussian EDT Surface Gaussian [Kazhdan et al., 2003]
Gaussian EDT • Properties: • Invertible • 3D array of information • Can be defined for any model • Difference measures proximity between surfaces Point Clouds Polygon Soups Closed Meshes Genus-0 Meshes Shape Spectrum