Remote Sensing & Photogrammetry L7
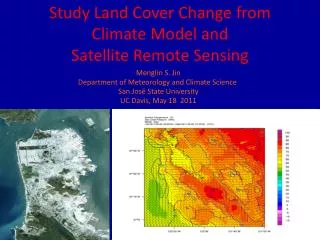
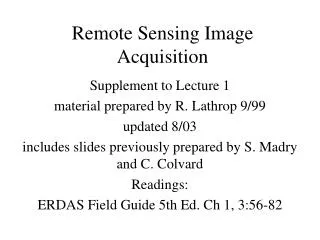
Remote Sensing & Photogrammetry L7. Beata Hejmanowska Building C4, room 212, phone: +4812 617 22 72 605 061 510 galia@agh.edu.pl. Photogrammetry. Marine resource mapping: an introductory manual - FAO Corporate Document Repository http://www.fao.org/DOCREP/003/T0390E/T0390E00.htm#Toc

Remote Sensing & Photogrammetry L7
E N D
Presentation Transcript
Remote Sensing & PhotogrammetryL7 Beata Hejmanowska Building C4, room 212, phone: +4812 617 22 72 605 061 510 galia@agh.edu.pl
Photogrammetry • Marine resource mapping: an introductory manual - FAO Corporate Document Repository http://www.fao.org/DOCREP/003/T0390E/T0390E00.htm#Toc • 8. AERIAL PHOTOGRAPHS AND THEIR INTERPRETATIONhttp://www.fao.org/DOCREP/003/T0390E/T0390E08.htm
8.3 Terminology of Aerial Photographs • Basic terminology associated with aerial photographs includes the following: • i) Format: the size of the photo; • ii) Focal plane: the plane in which the film is held in the camera for photography (Figure 8.3); • iii) Principal point (PP): the exact centre of the photo or focal point through which the optical axis passes. This is found by joining the fiducial or collimating marks which appear on every photo (Figure 8.4); • iv) Conjugate principal point: image of the principal point on the overlapping photograph of a stereo pair; • v) Optical axis: the line from the principal point through the centre of the lens. The optical axis is vertical to the focal plane (Figure 8.4); • vi) Focal length (f): the distance from the lens along the optical axis to the focal point (Figure 8.3); • vii) Plane of the equivalent positive: an imaginary plane at one focal length from the principal point, along the optical axis, on the opposite side of the lens from the focal plane (Figure 8.3); • viii) Flying height (H): height of the lens above sea level at the instant of exposure. The height of a specified feature above sea level is designated “h” (Figure 8.3); • ix) Plumb point (Nadir or vertical point): the point vertically beneath the lens at the instant of exposure (Figure 8.5); • x) Angle of tilt: the angle subtended at the lens by rays to the principal point and the plumb point (Figure 8.5).
Focal plane • Focal plane: the plane in which the film is held in the camera for photography • Focal length (f): the distance from the lens along the optical axis to the focal point • Flying height (H): height of the lens above sea level at the instant of exposure. The height of a specified feature above sea level is designated “h”
The principal point, fiducial marks and optical axis of aerial photographs • Principal point (PP): the exact centre of the photo or focal point through which the optical axis passes. This is found by joining the fiducial or collimating marks which appear on every photo • Optical axis: the line from the principal point through the centre of the lens. The optical axis is vertical to the focal plane
Plum point and angle of tilt of aerial photographs • Plumb point (Nadir or vertical point): the point vertically beneath the lens at the instant of exposure • Angle of tilt: the angle subtended at the lens by rays to the principal point and the plumb point
The effect of topography on photo scale: photo scale increases with an increase in elevation of terrain
Variations in scale in relation to aircraft attitude. (After C.H. Strandberg, 1967)
An undistorted aerial photograph (a); distorted (b); and rectified (c). (After P.J. Oxtoby and A. Brown, 1976)
Grid for transference of detail form an aerial photographs to a map: (a) polar grid; (b) polygonal grids(After G.C. Dickinsin, 1969)
Theory of Close Range Photogrammetry, Ch.2 of [Atkinson90] • http://www.lems.brown.edu/vision/people/leymarie/Refs/Photogrammetry/Atkinson90/Ch2Theory.html
Why photo is not a map? r RB-A R - error on the map coused by DTM ck wb wa B h A defines refernce level A
Radial dispacementan example r = 100 mm ck= 150 mm Dh = 1m DR = 0.67m Dh = 5m DR = 3.33m r = 100 mm ck= 300 mm Dh = 1m DR = 0.33m Dh = 5m DR = 1.67m
Airborne photo as a map - is it possible ? On the airborne photo: errors caused by DTM and photo oblige There is not possible to generate vertical airborhe photo, so even if the terrain is flat we are the errors caused by the oblige photo How to remove it?
A∙X+B∙Y+C x = D∙X+E∙Y+1 F∙X+G∙Y+H y = D∙X+E∙Y+1 Z Y X If terrain is flat the errors on the image can be removed by the projective transformation y x 8 unknown coefficients (A...E) One point = two equations 4 points – unique solution (any three points must not lay on the one line)
When terrain can be treated as a level? Each map is produced with given accuracy if R - error on the map caused by DTM is less then allowed map accuracy then Terain can be terated as plane (level)
When terrain can be treated as a level? r ck Rmax ? Mean erro± 0.3 mm in map scale B h A R Map scale 1:1000 0.3 mm = 30 cm in terrain 1:2 000 0.3 mm = 60 cm in terrain 1:10 000 0.3 mm = 3 m in terrain 1:25 000 0.3 mm = 7.5 m in terrain
rmax Z Y < 2Δhmax(maximum hight difference) X If terrain is ca. plane projective transformation can be applied y x Assuming reference plane in the middle of layer we have the thikness of the layer of ±Δhmax
example hmax Map scale = 1:1000; photo: ck = 100 mm rmax = 150 mm Rmax = 0.30 m hmax= 0.20m 2hmax= 0.40m Map scale= 1:1000; photo : ck = 300 mm rmax = 150 mm Rmax = 0.30 m hmax= 0.60m 2hmax=1.20m Map scale= 1:10 000; photo : ck = 200 mm rmax = 150 mm Rmax = 3.00 m hmax= 4.0 m 2hmax= 8.0 m
Coordinate system of airborne photo y Principal point x Fiducial points
Coordinate system of airborne photo y Proncipal point x
Coordinate of perspective centerin terrain coordinate systemX0, Y0, Z0 y x κ Z φ Y Projective center ω X External orientation of airborne photo Vertical line angle κ determines yaw of the airborne image (angle betwee x axis of the image and X axis of the terrain coordinate system) angles φ(in plane XZ), w(in plane YZ) deterimne tills of vertical camera axis Camera axis Terrain coordinate system
z Fiducial coordinate image system x - 0 x r = y - 0 = y 0 - ck - ck X0, Y0, Z0 r y P’ x XP – X0 R = YP – Y0 ZP – Z0 Z R Y Terrain system P XP, YP, ZP X Collineartity equation O ck O’ Vertical line
Collineartity equation Image system O z ck O’ r R = •A • r where: A – transformation atrix: κ λ – scale cofficient (λ = ) y P’ x Z R Y Terrain system Vertical line P X
Collineartity equation R = •A • r A – rotation matrix describes orientation of fiducial system in relation to the terrain system where: a11= cos κ cos φ a12= sin ω sin φ cos κ + cos ω sin κ a13= -cos ω sin φ cos κ + sin ω sin κ itd. .......
Collineartity equation r= 1/ •A-1• R a a a 11 21 31 = A-1= AT a a a 12 22 32 a a a r= 1/ •AT• R 13 23 33 R = •A • r
Collineartity equation xP a11 a21 a31 XP - X0 yP = 1/ • a12 a22 a32• YP - Y0 -ck a13 a23 a33 ZP - Z0 XP -X0 xP = 1/ • [a11 a21 a31] • YP -Y0 yP = ...... , -ck = ....... ZP -Z0 r= 1/ •AT• R xP = 1/ • (a11 • (XP - X0) + a21 • (YP – Y0) + a31 • (ZP – Z0)) yP = 1/ • (a12 • (XP - X0) + a22 • (YP - Y0) + a32 • (ZP - Z0)) ck = - 1/ • (a13 • (XP - X0) + a23 • (YP - Y0) + a33 • (ZP - Z0))
Collineartity equation r= 1/ •AT• R ck = - 1/ • (a13 • (XP - X0) + a23 • (YP - Y0) + a33 • (ZP - Z0)) hence 1/ = - ck / (a13 • (XP - X0) + a23 • (YP - Y0) + a33 • (ZP - Z0))
Collineartity equation terrain coordinate determination based on the point register on the image xP a11 a21 a31 XP - X0 yP = 1/ • a12 a22 a32• YP - Y0 -ck a13 a23 a33 ZP - Z0 • known: • xP, yPon the image and ckso together: r • X0, Y0, Z0(in vectorR) • (elements aij of matrix A) calculated: XP, YP, ZP (in vector R)
Collineartity equation terrain coordinate determination based on the point register on the image xP a11 a21 a31 XP - X0 yP = 1/ • a12 a22 a32• YP - Y0 -ck a13 a23 a33 ZP - Z0 Collinearity equation contained three unknowns: XP, YP, ZP, after separation to the component equation - we obtain two equations (xP=, yP=) not enough to the three unknowns calculation
Collineartity equation terrain coordinate determination based on the point register on the image xP’ a11’ a21’ a31’XP – X0’ yP’ = 1/’ • a12’a22’ a32’ • YP - Y0’ -ck a13’ a23’ a33’ ZP - Z0’ xP” a11” a21” a31”XP – X0” yP” = 1/” • a12”a22” a32” • YP - Y0” -ck a13” a23” a33” ZP - Z0” For coordinates XP, YP, ZP calculation from collinearity equation we have to measure the point on the two photos In this case we obtaine two times of two equations (4 equations) and we calculate three unknowns(XP, YP, ZP)
Z Y < 2Δhmax(maximum hight difference) X If terrain is ca. plane projective transformation can be applied photomap - from projective transformation assuming terrain is ca. plane y x
Orthophoto – in terrain is not flat y Part of the photo (pixel system) x Z DTM Y Orthophotomap X
Orthophotomap Assumptions: Known elements of interior and external photo orientation Known DTM Orthophotomap if the map in photographical way but without errors caused by DTM and tilled airborne camera
Image rectification Image rectification – image processing to the metric form and presented in terrain coordinate system Rectification result is called by photographical map, because map content is in photographical form by the geometry is changed – new artificial image is generated, like we obtain in orthogonal projection Photographical maps are categorized by photomaps and orthophotomaps, depending of the rectification method If terrain is flat or almost flat projective transformation is applied and the result is called photomap In the case if the applying of DTM is needed, because of the map accuracy, more complex process is involved, we called it orthophotorectification, and the result - orthophotomap KP
3’ 3’ 4’ 4’ 2’ 2’ 1’ 1’ 3 3 4 2 2 4 1 1 Mapping 2D on 2D – projective transformation mapping 3D on 2D – With collinearity equations Analythical relations Linearization needed simple unknowns A, B,…, H (8) (6) needed for unknowns determination at least 4 points 3 points x,y x,y X,Y X,Y,Z x,y in any image coordinate system x,y in fiducial coordinate system 5 pont and nexts are additional 4 point and nexts are additional
Data needed for image rectification • Photomap - 4 points of known x,y,X,Y • Orthophotomap: • camera calibration certification (for performing the interior orientation) • elements of external image orientation (or generation of the elements of external image orientation on teh base of minimum 3 points of known x,y,X,Y,Z) • Digital Terrain Model • Data can be obtained from: • aerotriangulation adjustements (will be lectured later) • measurements of the points on the image and in situ
Digital image B Projective transformation Photomap on the image plane Brighthess assign (digital image A) Digital fotomap generation
Digital image B Orthorectification ortofotomapaodwzorowanana płaszczyźniezdjęcia Brighthess assign (digital image A) Digital fotomap generation
Pixels of image A (photomap/orthophotomap) mapped on the image and their centres image B pixels New image (A) generation on the base of brightness of source image B is called resampling Image A pixels