Download
1 / 21
210 likes | 377 Views
Feedback Control of Computing Systems M2: Signals and Z-Transforms. Joseph L. Hellerstein IBM Thomas J Watson Research Center, NY hellers@us.ibm.com September 21, 2004. +. Controller. Notes Server. Notes Sensor. -. This module focuses on signals: time varying data. Motivating Example.

E N D
Feedback Control of Computing SystemsM2: Signals and Z-Transforms Joseph L. Hellerstein IBM Thomas J Watson Research Center, NY hellers@us.ibm.com September 21, 2004
+ Controller Notes Server Notes Sensor - This module focuses on signals: time varying data Motivating Example The problem Want to find y(k) in terms of KI so can design control system that is stable, accurate, settles quickly, and has small overshoot. But this is difficult to do with ARX models. The Solution Use a different representation
M2: Lecture
Agenda • Z-Transform representation of signals • Z-Transforms of common signals • Properties of z-transforms of signals • Poles • Effect of poles • Final value theorem Reference: “Feedback Control of Computer Systems”, Chapter 3.
z is time shift; z-1 is time delay Z-Transform of a Signal Time domain representation u(0)=1 u(1)=3 u(2)=2 u(3)=5 u(4)=6 z domain representation 1z0 + 3z-1 + 2z-2 + 5z-3 + 6z-4 u(k) k
Write the Z-Transforms or Plots for the Following Finite Signals (Drop exponents >0.)
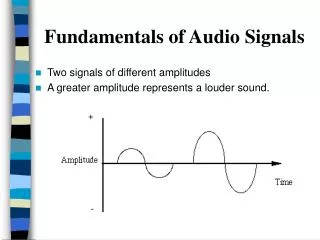
Common Signals: Impulse y(k) Impulse 1 time (k) 0 1 2 3
Common Signals: Step y(k) Step 1 time (k) 0 1 2 3
Construct a Z-Transform for the Following Infinite Length Signal
a=0.8 Common Signals: Geometric
Easy to find the poles of a geometric: Quick exercises: What are the poles of the following Z-Transforms? Easy if sum of geometrics 3 z = V ( z ) - + 2 z 0 . 5 z 0 . 06 Poles of a Z-Transform Definition: Values of z for which the denominator is 0 Pole is a. Harder if expanded polynomial Poles determine key behaviors of signals
Effect of Poleon the Signal • What happens when • |a| is larger? • |a|>1? • a<0? • Larger |a| • Slower convergence • |a|>1 • Does not converge • a<0 • Oscillates
Final Value Theorem • Provides an easy way to determine the steady state value of a signal • Limit as k becomes large (if V(z) has all of its poles inside the unit circle) Final value of the unit step is 1. Final value of the impulse is 0.
Delayed step Delayed geometric Describe the following Signals • Components of description • Does the signal converge • Fast or slow convergence • Oscillations, if any Step of 5 Geometric at .8
M2: Labs
Describe the Following Signals • Which converges more quickly? • Which of the following oscillate? • Do any of the following fail to converge?