Download
1 / 15
150 likes | 408 Views
4. Ad-hoc I: Hierarchical clustering Hierarchical versus Flat Flat methods generate a single partition into k clusters. The number k of clusters has to be determined by the user ahead of time. Hierarchical methods generate a hierarchy of partitions, i.e.

E N D
4. Ad-hoc I: Hierarchical clustering • Hierarchical versus Flat • Flat methods generate a single partition into k clusters. The number k of clusters has to be determined by the user ahead of time. • Hierarchical methods generate a hierarchy of partitions, i.e. • a partition P1 into 1 clusters (the entire collection) • a partition P2 into 2 clusters • … • a partition Pn into n clusters (each object forms its own cluster) • It is then up to the user to decide which of the partitions reflects actual sub-populations in the data.
P4 P3 P2 P1 Note: A sequence of partitions is called "hierarchical" if each cluster in a given partition is the union of clusters in the next larger partition. Top: hierarchical sequence of partitionsBottom: non hierarchical sequence
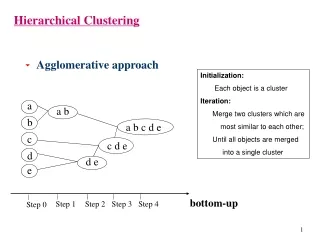
Hierarchical methods again come in two varieties, agglomerative and divisive. • Agglomerative methods: • Start with partition Pn, where each object forms its own cluster. • Merge the two closest clusters, obtaining Pn-1. • Repeat merge until only one cluster is left. • Divisive methods • Start with P1. • Split the collection into two clusters that are as homogenous (and as different from each other) as possible. • Apply splitting procedure recursively to the clusters.
Note: Agglomerative methods require a rule to decide which clusters to merge. Typically one defines a distance between clusters and then merges the two clusters that are closest. Divisive methods require a rule for splitting a cluster.
4.1 Hierarchical agglomerative clustering Need to define a distance d(P,Q) between groups, given a distance measure d(x,y) between observations. Commonly used distance measures: 1. d1(P,Q) = min d(x,y), for x in P, y in Q ( single linkage ) 2. d2(P,Q) = ave d(x,y), for x in P, y in Q ( average linkage ) 3. d3(P,Q) = max d(x,y), for x in P, y in Q ( complete linkage ) 4. ( centroid method ) 5. ( Ward’s method ) d5 is called Ward’s distance.
Motivation for Ward’s distance: • Let Pk = P1 ,…, Pk be a partition of the observations into k groups. • Measure goodness of a partition by the sum of squared distances of observations from their cluster means: • Consider all possible (k-1)-partitions obtainable from Pk by a merge • Merging two clusters with smallest Ward’s distance optimizes goodness of new partition.
4.2 Hierarchical divisive clustering • There are divisive versions of single linkage, average linkage, and Ward’s method. • Divisive version of single linkage: • Compute minimal spanning tree (graph connecting all the objects with smallest total edge length. • Break longest edge to obtain 2 subtrees, and a corresponding partition of the objects. • Apply process recursively to the subtrees. • Agglomerative and divisive versions of single linkage give identical results (more later).
Divisive version of Ward’s method. Given cluster R. Need to find split of R into 2 groups P,Q to minimize or, equivalently, to maximize Ward’s distance between P and Q. Note: No computationally feasible method to find optimal P, Q for large |R|. Have to use approximation.
Iterative algorithm to search for the optimal Ward’s split • Project observations in R on largest principal component. • Split at median to obtain initial clusters P, Q. • Repeat { • Assign each observation to cluster with closest mean • Re-compute cluster means • } Until convergence • Note: • Each step reduces RSS(P, Q) • No guarantee to find optimal partition.
Divisive version of average linkage Algorithm Diana, Struyf, Hubert, and Rousseuw, pp. 22
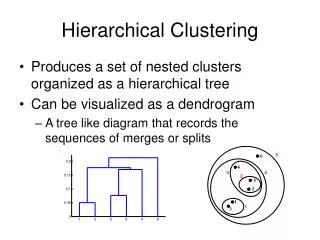
4.3 Dendograms • Result of hierarchical clustering can be represented as binary tree: • Root of tree represents entire collection • Terminal nodes represent observations • Each interior node represents a cluster • Each subtree represents a partition • Note:The tree defines many more partitions than the n-2 nontrivial ones constructed during the merge (or split) process. • Note: For HAC methods, the merge order defines a sequence of n subtrees of the full tree. For HDC methods a sequence of subtrees can be defined if there is a figure of merit for each split.
If distance between daughter clusters is monotonically increasing as we move up the tree, we can draw dendogram: y-coordinate of vertex = distance between daughter clusters. Point set and corresponding single linkage dendogram
Standard method to extract clusters from a dendogram: • Pick number of clusters k. • Cut dendogram at a level that results in k subtrees.
4.4 Experiment • Try hierarchical method on unimodal 2D datasets. • Experiments suggest: • Except in completely clear-cut situations, tree cutting (“cutree”) is useless for extracting clusters from a dendogram. • Complete linkage fails completely for elongated clusters.
Needed: • Diagnostics to decide whether the daughters of a dendogramnode really correspond to spatially separated clusters. • Automatic and manual methods for dendogram pruning. • Methods for assigning observations in pruned subtrees to clusters.