Managing Reentrant Drivers: Handling Interrupts and Read Operations in Multi-Processing Systems
This document discusses the implementation of reentrant drivers, focusing on handling read operations and interrupts within a multi-processing environment. It covers critical sections like initializing the driver, managing wait queues, and ensuring that processes accessing shared resources do so without conflicts. Specific attention is given to potential issues such as blocking readers and the importance of synchronization to maintain correct data processing. The challenges posed by concurrent read requests and interrupt handling, as well as strategies to ensure accurate sensor readings, are also discussed.

Managing Reentrant Drivers: Handling Interrupts and Read Operations in Multi-Processing Systems
E N D
Presentation Transcript
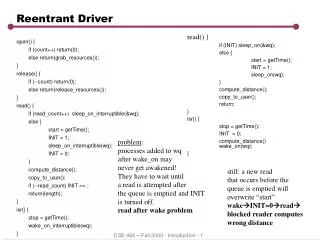
Reentrant Driver read() { if (INIT) sleep_on(&wq); else { start = getTime(); INIT = 1; sleep_on(wq); } compute_distance(); copy_to_user(); return; } isr() { stop = getTime(); INIT = 0; compute_distance() wake_on(wq); } open() { if (count++) return(0); else return(grab_resources()); } release() { if (--count) return(0); else return(release_resources()); } read() { if (read_count++) sleep_on_interruptible(&wq); else { start = getTime(); INIT = 1; sleep_on_interruptible(wq); INIT = 0; } compute_distance(); copy_to_user(); if (--read_count) INIT == ; return(length); } isr() { stop = getTime(); wake_on_interruptible(wq); } problem: processes added to wq after wake_on may never get awakened! They have to wait until a read is attempted after the queue is emptied and INIT is turned off. read after wake problem still: a new read that occurs before the queue is emptied will overwrite “start” wakeINIT=0readblocked reader computes wrong distance CSE 466 – Fall 2000 - Introduction - 1
Use a Bottom Half! read() { if (INIT) sleep_on(wq); else { start = getTime(); INIT = 1; sleep_on(wq); } copy_to_user(); if (empty(wq)) INIT = 0; return; } isr() { // reads will still pile up on the wait queue until the bh executes. stop = getTime(); add_to_bh_queue(isr_bh); } isr_bh() { // make a new queue for all future reads, compute distance with correct start-stop data. sonar_result = Compute_distance(); // do this once per interrupt INIT = 0; tmp = wq; // re-initialize queue to catch for read calls wq = (wait_queue*) kmalloc(sizeof(wait_queue)); wake_on(tmp); // wake old queue } will each reader get the “correct” reading? CSE 466 – Fall 2000 - Introduction - 2
FIFO’s, which are named pipes • Process 1 void main() { mknod(“/tmp/myfifo”, S_IFIFO ); // create a FIFO file node f = open(“/tmp/myfifo”, O_WRONLY); while (1) {generate_data(buf); write(q, buf, n);} } • Process 2 void main() { f = open(“/tmp/myfifo”, O_RDONLY); while (1) {read(q, buf, n); process_data(buf);} } • Works for “unrelated” processes • Multiple writers, Multiple readers • Kernel ensures mutual exclusion • Kernel does not control interleaving of writers, readers CSE 466 – Fall 2000 - Introduction - 3
Multi-Processor Systems A Control Dominated Example • controller • sense: • Temperature • H2 • Output Current • Output Voltage • Fan Speed • control • H2 valves • Output MOSFET • Fan Speed • Stack MOSFETS Air H2 Heat H20 not showing power supply circuitry for the controller…runs off fuel cell w/ backup battery. CSE 466 – Fall 2000 - Introduction - 4
System level Modes (Logical Structure) warmup online startup Self Check Pass Error Warm On Error Overload+ Off shtdwn Self Check Fail offline Error off Error CSE 466 – Fall 2000 - Introduction - 5
Mode Outputs Tasks Signals New Mode Off Load Disabled Power Supply Off Gas Valves Closed Power Button Enabled none Power Button Push Startup Startup Load Disabled Power Supply On Gas Valves Closed Initialize Temp Control H2 Detection Load Monitor UI Running Initialize Complete Warm Up Error Condition Detected* or shutdown request Shutdown Warmup Load Disabled Power Supply On Gas Valves Open Temp Control H2 Detection Load Monitor UI Running Operating Temp Reached Off Line Error Condition Detected* or shutdown request Shutdown Off Line Load Disabled Power Supply On Gas Valves Open Temp Control H2 Detection Load Monitor UI Running On-Line Command Received (UI) On Line Error Condition or Shutdown request Shutdown On Line Load Enabled Power Supply On Gas Valves Open Temp Control H2 Detection Load Monitor UI Running Off Line Command Off Line Overload Off Line Error Condition* or Shutdown Request Shutdown Shutdown Load Disabled Power Supply On Gas Valves Closed Fan On Temp Control Schedule transition to Off state Timeout Off State Table (*error conditions are mode dependent) CSE 466 – Fall 2000 - Introduction - 6
Examples of Mode Dependencies • Fan Speed Control: • In startup or shutdown mode always run minimum speed • otherwise attempt to maintain temperature set point • If fan doesn’t turn, issue badfan signal • Hydrogen Detection: always close hydrogen valves and issue h2dectected signal if hydrogen detected, except in startup mode. • Load Monitoring • If not online and output current > 0 or output voltage < min, then issue mosfet failure signal • If online and load current is > max allowed, or if output voltage is < min then turn on another stack. If all stacks are on, then issue overload signal. • UI Process • If “line” button pushed and online issue offline event, If offline issue online signal. • If “power” button pushed and not in off mode, then issue shutdown signal. CSE 466 – Fall 2000 - Introduction - 7
Logical Decomposition Output Logic signals UI Next State Logic Temp Load H2 Task inputs signals CSE 466 – Fall 2000 - Introduction - 8
Logical Implementation synchronized volatile state; task tempControl _task_ 1 { while(1) { t = readTemp(); if (t > MAXT) send_signal(TOOHOT); //blocking if (t < MINT) send_signal(TOOCOLD); if (t < setpoint) increase_fan_speed(); if (t > setpoint) decrease_fan_speed(); wait(ThermalTime); }} task loadMonitor _task_ 2 { while(1){ if (state != ONLINE) if (getLoad() > 0) send_signal(BADFET); else if (getLoad() > MAXLOAD) send_signal(OVRLOAD); wait(LoadTime); }} task H2Monitor _task_ 3 { while (1) { if (state() != startUp) if ((getH2() < MINH) || (getH2() > MAXH)) send_signal(H2FAILURE); }} // let this process fill in all unused cycles! task stateMgr _task_ 0 { while (1) { recv_signal(&s); // blocking switch(state) startUp: switch(s) TOOHOT: state = SHTDWN; … break; … } Issues: what are send_signal() and recv_signal()? How can synchronized state be implemented? CSE 466 – Fall 2000 - Introduction - 9
Physical Decomposition -- Layers network layer Socket could be implemented in shared memory, internet, or anything in between. High level architecture can be independent of implementation choices. Synthesis Problem: Map processes and sockets to processors and networks. Optimize performance, latency, shared mem. Warning: usually not done this way for embedded systems…usually designer performs the physical decomposition and app is written to the hardware…not a good idea! application layer signals load State Mgr + UI state physical layer temp H2 CSE 466 – Fall 2000 - Introduction - 10
Example of Physical Layer: SPI Bus Master Slave SCK SCK SDO SDI SDI SDO void isr() interrupt TIMER { SDR = S; while(!SPF); R = SDR; } void isr() interrupt SPF{ R = SDR; SDR = S signal(RECV); } 1 0 0 1 1 1 1 0 0 0 0 1 1 0 0 0 shift reg shift reg CSE 466 – Fall 2000 - Introduction - 11
Multiple Slave Configuration Master Slave SCK SCK SDO SDI SDI SDO Slave SCK SDI SDO CSE 466 – Fall 2000 - Introduction - 12
ISO Layers Continued • Transport Layer: responsible for end-to-end protocol of user data buffer transmissions. Source and destination addresses are private – host to host. • Maps application space channel (socket) name to network address. • makes network packets w/ transport header and communicates w/ network layer. • Each layer has a peer-to-peer and an intra-stack protocol Application Application write(s, buf,n); read(s, buf,n ); Transport -- TCP Transport -- TCP Network -- IP Network -- IP Network -- IP Network -- IP Datalink -- Ether Datalink -- Ether Datalink -- Ether Datalink -- Ether Physical -- Ether ethernet fiber fiber ethernet Physical -- Ether CSE 466 – Fall 2000 - Introduction - 13
Embedded Networking: Simplest Case • Simple case: socket name is the same as physical address. No mapping, we just need to break our message into frames…maybe • Physical Layer – typically low bandwidth, serial, byte oriented • Data link layer – read/write interface to the application • frames: destination address, data, checksum. • No mapping from sockets to network address • No mapping from network address to physical address (no routing) Application Application write(s, buf,n); read(s, buf,n ); Transport Transport Network -- IP Network -- IP Network -- IP Network -- IP Datalink Datalink -- Ether Datalink -- Ether Datalink Physical ethernet fiber fiber ethernet Physical CSE 466 – Fall 2000 - Introduction - 14
Master Slave Data Link Protocol • As an example frame is [destination address, command, data] • An acknowledgement frame is [address, data, checksum] Master Slave SCK SCK SDO SDI SDI SDO mux Slave SCK dst cmd data dst type data SDI addr data sum type data sum SDO mux x x x 1 1 1 2 2 2 CSE 466 – Fall 2000 - Introduction - 15
Multi-master Systems: I2C • Multi-mastered • Send and receive • Two wire (plus ground) • Packet oriented (block send) CSE 466 – Fall 2000 - Introduction - 16
Major Features of I2C CSE 466 – Fall 2000 - Introduction - 17
Physical Layer CSE 466 – Fall 2000 - Introduction - 18
Bit Transfer Transmitter Master CSE 466 – Fall 2000 - Introduction - 19
Who gets to be master The one who initiates a frame: A frame is: <Start><addr><data>…<data><Stop> OR <Start><addr><data>…<data><R_Start><addr><data>…<Stop> CSE 466 – Fall 2000 - Introduction - 20
An I2C Byte Transfer MSB First Rx MSB……………….LSB slave slave Tx Device Rx Device master CSE 466 – Fall 2000 - Introduction - 21
A Complete Frame MSB……..LSB CSE 466 – Fall 2000 - Introduction - 22
Beauty of Layers • App doesn’t care if lower layer is SPI or I2C • How much can we isolate the physical differences? CSE 466 – Fall 2000 - Introduction - 23