Download
1 / 9
90 likes | 595 Views
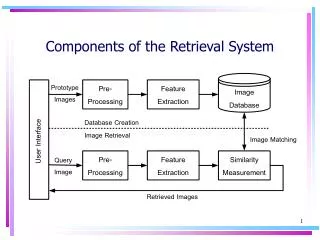
Robot Retrieval System Millersville University Contributors: Frank Anamze Ben Bowman Brandon Dodson Brad Lang Jacquie Miley Seth Powers Ben Tarnowski Matt Vazquez Panama Beach City, Florida November 6-9, 2002 Competition Rules/Objective

E N D
Robot Retrieval System Millersville University Contributors: Frank Anamze Ben Bowman Brandon Dodson Brad Lang Jacquie Miley Seth Powers Ben Tarnowski Matt Vazquez Panama Beach City, Florida November 6-9, 2002
Competition Rules/Objective • Must be a tele-operated robot using no robotic kits, only hobbyist level components are allowed. • The objective is to retrieve an unopened 12 oz. soda can without creating damage to the can. • Must be able to travel in an unknown terrain obstacle course while staying within the boundaries. • Manipulator may not be able to fly. • Multiple frequency channels are allowed but only one operator. Source: http://www.nait.org/divisions/roboticscontest.html
E-maxxbot • Platform-Traxxas E-maxx:Chose for sturdiness, high clearance, and able to support a heavy load. • Gripper:Designed to surround the can completely to ensure that it is secure and free from any damage. • Arm:Designed to lift the can off the ground to avoid the unknown terrain in the obstacle course.
Fabricated a light weight aluminum frame for mounting the arm and gripper system. Purchased a hobbyist level remote controlled racing car that has the power to withstand the weight of a 12 oz. soda can and the rest of the mechanical systems. Platform-Traxxas E-maxx
Fabricated a gripper that mimicked the shape of a soda can and completely encompassed when closed. A shelf was mounted at the bottom of the gripper to restrict the can from falling through when the arm was lifted. To open and close the gripper, a servo motor uses rods to transfer circular motion into linear motion. Gripper System
Arm System Overall IMA = Screw IMA * Lever IMA Overall IMA = 4 * 1.57 Overall IMA = 6.28:1 • Used a first class lever system to gain a mechanical advantage when lifting the soda can and gripper. • A screw system is used to raise and lower the arm assembly powered by a 14 volt DC motor.
Transmitters/Receivers • Two transmitting signals are used: 27Mhz AM and 75Mhz FM. • 27Mhz signal is used for driving, steering (servo), and controlling the gripper (servo) opened or closed. • 75Mhz signal uses a servo motor to mechanically switch back and forth between the drive motors and the screw system motor preventing both motors from running simultaneously. • This system activates relay coils between the speed controller and the 14 VDC motors to prevent high amperage flow through the mechanical switch because of the low amperage rating.
Interfering signals because of metal frame. Shock absorbing springs were too weak to support the full load. Force needed to raise the manipulator and load was too great for motor being used. Replaced receiver unit with different frequency. Replaced with stiffer springs. Repositioned fulcrum to gain mechanical advantage. Replaced motor with a higher power rating. Troubleshooting Problems Solutions
Acknowledgements Special thanks to all who helped with their time and support. Pit-Stop Hobbies Dr. John R. Wright, Jr. Dr. Haig M. Vahradian Dr. John C. Hibberd Dr. Kenneth P. Delucca Mr. Mike Joy Mr. Ken Stough NAIT Millersville University Student Chapter