Download
1 / 15
150 likes | 1.03k Views
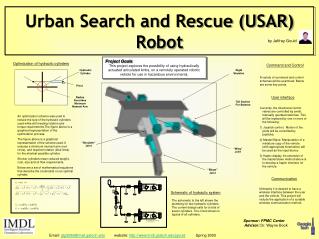
Rescue Robot Summer 2005 Sharif University of Technology Bahador Khaleghi Amir Aminsabouri Outline Introduction Processor Specs Sensors Actuators Communications Computational power Environment model Behavioral analysis Scan time Memory allocation Software architecture

E N D
Rescue Robot Summer 2005 Sharif University of Technology Bahador Khaleghi Amir Aminsabouri
Outline • Introduction • Processor Specs • Sensors • Actuators • Communications • Computational power • Environment model • Behavioral analysis • Scan time • Memory allocation • Software architecture • Power consumption • Cost estimation
Introduction • Purpose • Plan overview
Processor Specs • Name PIC18F452 • Architecture RISC with C Compiler • Operating Frequency DC – 40 MHz • Program Memory (Bytes) 32K • Program Memory (Instructions) 16384 • Data Memory (Bytes) 1536 • Data EEPROM Memory (Bytes) 256 • Instruction Set 75 Instructions • Interrupt Sources • I/O Ports • Timers • Capture/Compare/PWM Module • Serial and Parallel Communication • 10-bit Analog-to-Digital Module
Sensors • TPA-81 • IR Diffuse Sensor • Rotary Encoders • Gyroscope • Gas Sensor
Actuators • DC Motors • Lamps and Buzzers • Servo Motor
Communications • Serial RS-232 • Peer to Peer • XStream Modem • Data stream • Robot to Host • Host to Robot
Environment model • Grid based model • Size of blocks • Robot movement • Goals • Victim • Fire flame 3 2 4 Robot 1 5
Behavioral analysis (for every control cycle) • Gathering environmental data • Reading gas sensor • Scanning environment through TPA-81 • Processing & Actuation • Next way to take • Change direction • Object detection • Store & send the results • Gas condensation • Current block coordinates
Scan time • Response time of components: • Gas Sensor : 2 sec • TPA-81 : 10 msec • IR Diffuse sensor : 3msec • Gyroscope : realtime • Servo Motor : 200 degree per second • Shaft Encoder : max frequency 180 KHz • Overall scan time : about 10 seconds
Memory allocation • Program memory • 32KByte • Data memory (max 400 blocks) • 800 Byte: Path • 50 Byte: Gas Status • 750 Byte: Other data
Power consumption • Processor : 250 mW • Max233 chip : 75 mW • L298 Chip : 500 mW • Lamps : 750 mW • Buzzer : 1.2 W • Radio modem : 600 mW • Gas sensor : 500 mW • TPA-81 sensor : 25 mW • Servo motor : 1 W • IR sensor : 520 mW • Shaft encoders : 2.16 W • Gyroscope : 50 mW • Motor interface : 500 mW • Voltage regulator 7805 : 120 mW
Power consumption (cntd.) • Max current in 12 V : 400 mA • Max current in 5 V : 750 mA • Total current : 1150 mA • For operating 2 hours autonomously: 12V, 2.3Ah
Cost estimation • Shaft encoders: 1,000,000 Rls • IR Diffuse sensor: 280,000 Rls • Battle Tank Toy: 380,000 Rls • TPA-81 sensor: 770,000 Rls • Servo motor: 140,000 Rls • Gyroscope: 550,000 Rls • CO gas sensor: 45,000 Rls • PIC18F452 microcontroller: 555,000 Rls • Canada government tax: 222,000 Rls • PCB manufacture cost: 1,000,000 Rls • Radio modem: available in dep. • Battery: available in dep. • Overall Estimated Cost : 3,550,000 Rls