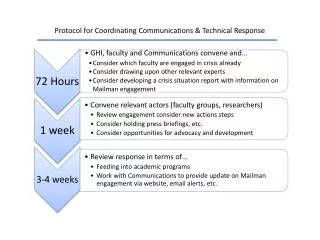
Technical Coordinating Unit on Robot Planning
180 likes | 646 Views
Technical Coordinating Unit on Robot Planning TCU Participants Aegean University, Vangelis Kourakos Brescia University, A.Gerevini Freiburg University, B.Nebel Genova University, E. Giunchiglia GMD, J.Hertzberg IRST, P.Traverso LAAS, M.Ghallab Linköping University, P.Doherty

Technical Coordinating Unit on Robot Planning
E N D
Presentation Transcript
TCU Participants • Aegean University, Vangelis Kourakos • Brescia University, A.Gerevini • Freiburg University, B.Nebel • Genova University, E. Giunchiglia • GMD, J.Hertzberg • IRST, P.Traverso • LAAS, M.Ghallab • Linköping University, P.Doherty • Lund University, J. Malec • Madrid Carlos III University, D.Borrajo • Munich University, M.Beetz • NCSR Demokritos, C. Spyropoulos, • ONERA, P.Fabiani • Orebro University, A.Saffiotti • Rovira i Virgili University, M.A. Garcia • Siemens Corp. Techno., W.Feiten • Ulm University, S. Biundo, B.Schattenberg Robot Planning TCU
Roadmap • Problems and challenges in Robot Planning • State of the art • Technology maturity • What needs to be done • Research at TCU Nodes Robot Planning TCU
Robot planning A computational activity that relies on: • Models of environment and robot • Specification of required goals and utilities • Online input from sensors and communication channels to perform prediction and choices for achieving goals and utilities • Robotics without planning: handcoded environment structure, strategy and goals into purely reactive control • Specifics of planning in robotics: • heterogeneous partial models and state information, • direct integration of planning to acting and sensing Robot Planning TCU
Purpose of planning in robotics Improve the performance of robots for carrying out • a set of tasks in • a class of environments Performance criteria: • Robustness of the behavior of robots with respect to: • Variety of environments • Diversity of tasks • Quality and cost of: • Environment modeling • Modification and verification of robot controllers • Interaction with and among robots Robot Planning TCU
Forms and components of robot planning • Path and motion planning: Geometric path and control trajectory along that path • Perception planning: • Which information is needed, and when • Where to look for it • Which sensors are most adequate, and how to use them • Navigation planning: Strategy using localization primitives, visual servoing and other sensory-controlled motion primitives, for reaching a goal, exploring an area Robot Planning TCU
Forms and components of robot planning • Manipulation planning: Similar strategy of sensory-motor primitives using forces and touch (haptics), vision, etc, to handle objects and assemblies • Task planning: Classical set of state-transition operators, with Time and resource allocation, dynamic environment, uncertainty • Communication planning: In multi-robots cooperation, Man-machine interaction How to query needed information, which feedback is required Robot Planning TCU
Forms and components of robot planning PLANET is not active in all these areas Robot Planning TCU has to be aware of them and their common features: • Uncertainty • On-line constraints • Dynamic environments and feedback loops • Multi-agency Robot Planning TCU has to build on top of them Robot Planning TCU
Challenges and requirements Integration of sensory-motor capabilities with deliberative, goal-oriented capabilities • Integrate planning to acting • Integrate heterogeneous representations: • Space, time, kinematics and dynamics, physics of sensors, uncertainty, logical properties, various constraints, including computational • Integrate various forms of planning • Integrate planning and learning to extend sensory-motor controllers Robot Planning TCU
State of the art Available material • Good surveys and reference works in the literature on basic robot planning components, e.g. • Path and motion planning • Task planning • Roadmap surveys current work on • Integration of planning, acting and sensing (Ulm Univ.) • Uncertainty in robot planning (ONERA) • Integration of planning and learning (Madrid) Robot Planning TCU
Maturity Mainly of planning components : • Path and motion planning : a well mature technology Techniques: computationnal geometry and probabilistic algorithms Robot Planning TCU
Maturity • Task planning : a wealth of algorithms in the classical framework Techniques: search, heuristics, disjunctive refinement, CSPs • Perception planning: some focused problems well solved, e.g. viewpoint selection Techniques: mathematical programming • High level reactive controllers: preprogrammed goal-directed behaviors • PRS, Propice, RAP, SRCs and similar systems well advanced and integrated to sensory-motoric level • Most laboratory robots run on them Robot Planning TCU
Possible technology transfer • Within robotics There are other limiting factors for industrial deployment, e.g. sensory-motoric functions, reliability, security and cost • Reactive controllers: the easy first step • Special purpose navigation and perception planning capabilities • In other domains • Path and motion planning: in CAD, Animation and Graphics • Tasks planning with time and resources: in manufacturing, process planning, workflow management, network management • Reactive controllers: in transportation systems • Integrated planning systems in well structured domains: autonomous spacecraft • Perception planning in surveillance systems Robot Planning TCU
What needs to be done • Research on integration problems • Planning and acting • Reaction / deliberation architecture • Planning depth and on-line constraints • Execution models • Fault detection, diagnosis, recovery • Heterogeneous representation • Heterogeneous planning techniques • Planning with information gathering and sensing • Access to world state • Planning (with) action sensing • Planning and learning Robot Planning TCU
Typical projects • Cooperating service robots Transportation, surveillance, cleaning, search and gathering of object, e.g., office assistants • Surveillance and monitoring of the traffic network • Exploration robots, environment monitoring: the Baltic watch project Robot Planning TCU
TCU activities ECAI Workshop August 2000 Perception Planning • Talks • Perception planning for surveillance, tracking or cooperationP.Fabiani • Perception planning for autonomous service robotsM.Beetz, J.Schumacher • The WITAS project, anchoring and perception planningP.Doherty • Discussion on representations and reasoning required for sensor models, environments, sensing tasks Robot Planning TCU
TCU Activities Dagstuhl seminar, October 2001 Plan-based Control of Robotics Agents • Topics: • perception in plan-based control • plan notations, plan execution, and monitoring • execution-time plan management • formal models of plan-based control • plan-based control and learning • challenge problems and benchmarks • Participants: 50, from Europe, USA, Australia • Planned outcome: Book LNAI, Springer Robot Planning TCU
TCU Activities Workshops during 2002 • At AIPS'02 • 3rd Cognitive Robotics Workshop • Other workshops ? (submission deadline: September 21st) • At ECAI'02 Robot Planning TCU