Download
1 / 29
290 likes | 529 Views
Calculating acceleration using ADXL213 – dual axis accelerometer. Cargo Monitoring System Disaster likely to be in remote areas . Cargo to be delivered by skid-air drop During transport Quick indication of health of product NOW Acceleration in range – accuracy of +- 1/8 G

E N D
Calculating acceleration using ADXL213 – dual axis accelerometer
Cargo Monitoring System Disaster likely to be in remote areas Cargo to be delivered by skid-air drop • During transport • Quick indication of health of product NOW • Acceleration in range – accuracy of +- 1/8 G • Temperature steady – accuracy of +- 1 / 32 C • On delivery • Display of ranges that cargo has experienced • Range of temperatures and accelerations • Other cargo information
ReminderHow is the project being split up? • Devices use pulse-width modulation • Acceleration – Handle through examples in the lectures • Temperature – You are handling this in Lab. 3.This means that all the tests and functions developed in the lectures for handling acceleration using a pulse-width modulated device will need to be modified by you for handling temperature • LCD display – SPI interface • Acceleration – Handle through examples in the lectures • Temperature – You are handling this in Lab. 4 • This means that all the tests and functions developed in the lectures for displaying acceleration using am SPI display device will need to be modified by you for handling temperature
Overall design General Purpose Timercontrolling Display asISR Temperature / Accelerationgraphic (non-text) displayChanges, actual temperatures main( ) Initialize stuff (C++) Calculate Temperature Lab. 3 Core temperatureISR clockused forTemperature / Accelerationdetermination Store temperature, calculate averages and ranges Communications with LCDMOSI / MISO format -- ISR Temperature / AccelerationinformationText format Calculate Acceleration Lecture Store acceleration, calculate averages and ranges
Design details added main( ) #define ACCELERATION_STEADY 1#define ACCELERATION_DECREASING 2#define ACCELERATION_INCREASING 3 variable acceleration_changing Initialize stuff (C++) Calculate Temperature Communicationbetweenmain( )and ISR Store temperature, calculate averages and ranges General Purpose Timercontrolling Display asISR Temperature / Accelerationgraphic (non-text) displayChanges, actual temperatures Calculate Acceleration Store acceleration, calculate averages and ranges
Lab3 directory – where product will end up being built lab3prototypes.h #define ACCELERATION_STEADY 1#define ACCELERATION_DECREASING 2 #define ACCELERATION_INCREASING 3 void Set_Acceleration_Mode(long int current_Acc, long int average_ACC); CodeAcceleration.cpp Set_Acceleration_Mode( current_Acc, average_ACC) { All necessary code to make function work } Lab3 tests directory – where all tests will be built TestsAcceleration.cpp TEST(Set_Acceleration_Mode, DEVELOPER_TEST) { All necessary code to test that function works } Three files are going to be needed
Set_Acceleration_Mode( ) Test Recap #include “../Lab3/lab3prototypes.h” extern volatile long int acceleration_changing; // Declared in CodeAcceleration.cpp // Lab3 directory -- global TEST(Set_Acceleration_Mode, DEVELOPER_TEST) // acceleration_now == average_acceleration Set_Acceleration_Mode(6 , 6); CHECK(acceleration_changing == ACCELERATION_STEADY); // acceleration_now < average_acceleration Set_Acceleration_Mode(0 , 6); CHECK(acceleration_changing == ACCELERATION_DECREASING); // acceleration_now > average_acceleration Set_Acceleration_Mode(6, 0) CHECK(acceleration_changing == ACCELERATION_INCREASING); } Then we wrote the code to satisfy the test
Recap -- test – Ability to calculate Average #include “../Lab3/lab3prototypes.h” TEST(AverageCalculation, DEVELOPER_TEST) int previous_values[10] = {0, 0, 2, 2, 1, 1, 10, 10, 10, 10}; int average_value = 0; bool result = true; // Empty array -- invalid number of points as array lengthresult =CalculateAverage(previous_values, 0, &average_value); CHECK(result == false); // Average first two values average_value = 6; result =CalculateAverage(previous_values, 2, &average_value); CHECK(result == true); CHECK(average_value == 0); // Average first four values result =CalculateAverage(previous_values, 4, &average_value); CHECK(result == true); CHECK(average_value == 1); etc. Then we wrote the code to satisfy the test
Recap -- Tests for bool AddToArray(int *, int, int) #include “../Lab3/lab3prototypes.h” TEST(AddToArray, DEVELOPER_TEST) { #define MAX_ARRAY_SIZE 8 // WOULD THIS BE BETTER DEFINED INSIDE ../Lab3/lab3prototypes.h? int previous_values[MAX_ARRAY_SIZE] = {0, 0, 0, 0, 0, 0, 0, 0}; bool result; // Have a new acceleration value of 1 – add to the array int expected [MAX_ARRAY_SIZE] = {1, 0, 0, 0, 0, 0, 0, 0}; result =AddToArray(previous_values, MAX_ARRAY_SIZE, 1);CHECK(result == true);ARRAYS_EQUAL(expected1, previous_values, MAX_ARRAY_SIZE); // Have new acceleration values of 2 and then 3 – add those to the array int expected2[MAX_ARRAY_SIZE] = {1, 2, 3, 0, 0, 0, 0, 0}; result =AddToArray(previous_values, MAX_ARRAY_SIZE, 2); CHECK(result == true); result =AddToArray(previous_values, MAX_ARRAY_SIZE, 3); CHECK(result == true); ARRAYS_EQUAL(expected2, previous_values, MAX_ARRAY_SIZE); …………………………MORE TEST CODE ON NEXT PAGE ……………………………. Then we wrote the code to satisfy the test
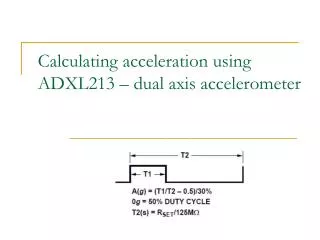
Calculation the acceleration using information from the hardware • Let us assume that we have the time (in clock pulses) for T1 (T1_high) and T2 (T2_period) • Need to develop the tests to check that correctly calculate the acceleration when the acceleration is in the range +1.7G to -1.7G bool CalculateAcceleration(int T1_high, int T2_period, int *new_acceleration_value) Thermometer in Lab. 3 works on exactly the same principle
You were askedBefore tomorrow’s class • Write the tests needed to show that bool CalculateAcceleration(int T1_high, int T2_period, int *new_acceleration_value) correctly calculates the acceleration when the acceleration is in the range +1.7G to -1.7G Through this test design – identify the “design defect” in the current project design concept for the transportation monitoring device
Select a volun-tell to write this test T1 is half of T2 – 50% duty cycle • Manual says result should be 0 g CalculateAcceleration(1, 2, new_acceleration_value == 0 g) TEST(HALF_DUTY_CYCLE, DEVELOPER_TEST) { }
Select a volun-tell to write this test • T1 = 0 • Manual says A(g) = (0 – 0.5) / 30% = -0.5 / 30% • What does -0.5 / 30% mean? • Engineering guess – poor description. • Do they mean 30% is to be read as 0.30? • T1 = 0 therefore means A(g) = (0 – 0.5 ) / 0.3 = -1.666g. Would make some sense – since data book says accelerometer works 1.7G to -1.7G • TEST(ZERO_DUTY_CYCLE, DEVELOPER_TEST) { • }
You write the testfor correct result • T1 = T2 • TEST(HUNDREDPERCENT_DUTY_CYCLE, DEVELOPER_TEST) { • }
You write the testfor correct result • Should return false when T2 = 0 or negative • Should return false if T1 > T2 or T1 < 0 • TEST(BAD_T1_OR_T2, DEVELOPER_TEST) { • }
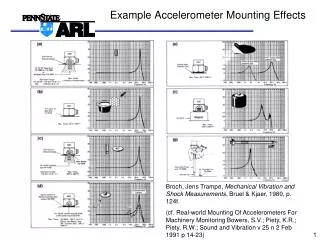
ADXL213 “tilt sensor” mode info X 50% 0gY 20% -1g X 50% 0gY 80% 1g X 50%Y 50%
You write the testfor tilt mode • TEST(TILT TEST, DEVELOPER_TEST) { • // Should there be 5 asserts to match the known values in Fig. 21? • }
Problem • Some people have all tests pass – depends on the tests written • This group would move on, assuming everything is correct • However this group has a DESIGN DEFECT which will cause problems later on as the DEFECT will be very difficult to identify (w.r.t. location) • Some people have most tests fail • Some of this group will change their CODE until everything is correct. They spotted a DESIGN ERROR and fixed it before it caused a problem • Some of this group will change their TESTS until everything is correct.However this group NOW has a DESIGN DEFECT which will cause problems later on as the DEFECT will be very difficult to identify (w.r.t. location) • Correct answer – most tests should be failing • Why the difference? Depends on how you wrote the test
Understanding why the errors • We need to understand what sort of assembly code will be generated by the compiler int new_acceleration = 1000; // Use ridiculous starting values int expected_value = 1.6666; CalculateAcceleration(1, 1, &new_acceleration); CHECK(new_acceleration == expected_value); CHECK(new_acceleration == 1.666); // ASSERT FAILS
Understanding why the errors // Stack picture // OLD RTS FP + 4 -- needed for P0 = [FP + 4]; JUMP (P0); // OLD FP FP // storage for new_acceleration FP – 4 or SP + 20 // storage for expected _value FP – 8 or SP + 16 LINK (16 + 2 *4); // Need to place two variables on the stack// int new_acceleration = 1000; // Use ridiculous starting values R3 = 1000 (X);[FP – 4] = R3; // address of new_acceleration used in subroutine call // Must have value on stack as need AN ADDRESS // int expected_value = 1.6666;R2 = 1 (X); [FP – 8] = R2; // R2 will be destroyed during subroutine call // Place value on stack as need after subroutine call // CalculateAcceleration(1, 1, &new_acceleration); R2 = FP; R2 += - 4; // Address of new_acceleration on stack – last Friday’s lecture R1 = 1; R0 = R1;CALL _CalculateAcceleration__FiT1Pi
Understanding why the errors occur // int expected_value = 1.6666;R2 = 1 (X); [FP – 8] = R4; This is an integer processor -- floating point number 1.6666 is rounded down to 1 (might be rounded up to 2) by the compiler preprocessor SOLUTION 1 -- Use floats rather than integers Use float expected_value = 1.6666;Do all calculations using floating point operations rather than integer Most integer processor compilers WILL support floating point operations But this processor is an integer processor, so the compiler will use “software implementation” of floating point operations – roughly 200 to 300 times slower than equivalent integer operations. (Why?) Remember – will have to modify all operations on temperatures to support floating point operations – Store-to-array, Calculate-Average, SetMax etc. This could take a lot of development time Is there an easy solution to provide the correct answer without a lot of extra development work.
Understanding why the errors // int expected_value = 1.6666;R2 = 1 (X); [FP – 8] = R4; This is an integer processor -- floating point number 1.6666 is rounded down to 1 (might be rounded up to 2) by the compiler preprocessor SOLUTION 2 – Scale values by 0x10000 0g represented by 0x00000 1 g represented by 0x10000 0.5g represented by 0x08000 (which is 0x10000 >> 1) 0.25g represented by 0x04000 (which is 0x10000 >> 2) Will this work for the processor? Addition works when doing this – ditto subtraction 1.5g represented by 0x18000 (0x10000 + 0x08000) Multiplication works 0.5g * 2 = 0x8000 * 2 = 0x10000 = 1 g Division works – if we are careful 1.666666 = 5 / 3 * 0x10000 = 1 * 0x10000 = 0x10000 = 1 – wrong answer 1.666666 = (0x10000 * 5) / 3 = 0x50000 / 3 = 0x1AAAA = 1.66666 g or CLOSE TO IT NOT ALL POSSIBLE VALUES CAN BE REPRESENTED IN A COMPUTERROUND-OFF ERROR (TRUNCATION ERROR, QUANTIZATION ERROR)
Improved tests and functionAlmost passes tests – Accuracy problem?
REVIEW – How are floating point numbers stored in a computer as a binary values • Use VDSP tool to see values displayed as integers • Displayed as floats Values2020.01010.055.011.0
REVIEW – How are floating point numbers stored in a computer as a binary values • Integer 20 = 16 + 4 = 0x14 = b00010100 • Floating point 20.0 = 0x14 = b00010100 as integer = 0x1.4 * 24 = b1.1000 * 24 normalized Convention – normalized values are in the form b1.frac * 2exponent
REVIEW – How are floating point numbers stored in a computer as a binary values • Floating point 20.0 = 0x14 = b00010100 as integer = 0x1.4 * 24 = + b1.0100 * 24 normalized IEEE Convention – normalized values are in the form + b1.frac * 2exponent IEEE Convention – normalized values are stored as 1 bit 8-bits 23-bits sign bit biased exponent fractional partexponent + 127 b0127 + 4b0100 0000 0000 0000 0000 000 b00x7F + 4b0100 0000 0000 0000 0000 000 b00x83 b0100 0000 0000 0000 0000 000 b0 b10000011b0100 0000 0000 0000 0000 000 b0100 000110100000 0000 0000 0000 0000 0x4 1 A 0 0 0 0 0
You should be able to convert over decimal values to floating point format • 2.5 • 0.25 • 128.625 • Then use the VDSP register display window to display the values and check if you have the correct answer
Done today • Reviewed the Lab. 3 project • Identified a major design flaw • Modified the code to fix the design flaw • Almost fixed the problem with just one line changed in code • Have identified a possible accuracy error • Can we “completely” fix the accuracy problem with further improvements in code design? • Is this a fundamental limitation of the algorithm and the tests need to be modified to incorporate the limitation? • Review of knowledge issues related to design flaw • Understand how integer and floating numbers are compared in a computer program • Understand how integer and floating numbers are stored in a computer program