Download
1 / 32
320 likes | 661 Views
Simulating Multi-Rigid-Body Dynamics with Contact and Friction. Mihai Anitescu SIAM OPTIMIZATION MEETING May 10, 1999. Rigid Multi-Body Dynamics Simulation Applications. Industrial simulation and design for aircraft, ships, heavy vehicles (product design -- production, 5 years).

E N D
Simulating Multi-Rigid-Body Dynamics with Contact and Friction Mihai Anitescu SIAM OPTIMIZATION MEETING May 10, 1999
Rigid Multi-Body Dynamics Simulation Applications • Industrial simulation and design for aircraft, ships, heavy vehicles (product design -- production, 5 years). • Flexible Manufacturing Systems design and redesign (commissioning+tuning, 3 years). • Appropriate simulation could reduce lead times by up to 50%. • Simulating virtual environments (+real time = interactive).
Insert Picture Virtual Environment Application Example • Setting up the real installation for training is very expensive. • The virtual environment can be easily modified for different scenarios, but simulating it in real-time is essential. • Simplified model: rigid bodies with joints and contacts.
Initial model requirements • Acceleration based Newton laws. • Rigid bodies. • No inter penetration, nonnegative contact impulses and passive contact • Joint constraints • Coulomb friction or reasonable approximations. • Impact resolution (Poisson hypothesis).
Inconsistency example • State space representation • Constraint , initially
Frictional Inconsistency • What went wrong? Newton’s laws rather than Coulomb’s model. • Configuration inconsistent, not only singular. • P. Painleve: Governing equations of motion do not have a solution in general( Comptes Rendus Acad. Sci. Paris, 1895). • Approaches for the continuous case. • Solutions in a distributional sense. • Differential inclusions instead of differential equations (Moreau, 1986; Monteiro-Marques, 1993).
Avoiding Frictional Inconsistencyin time-stepping schemes • Time-stepping: If a continuous model exists, how should the associated numerical integration scheme look like? • Friction is estimated, and the frictionless problem is solved (Lotstedt,1982). Problems: starting configuration and the impact case. • The inconsistent configuration is treated as a collision(Baraff,1993). Problems: arbitrary collisions and the impact case. • Newton's law with impulses and velocities (Stewart & Trinkle 1995; Anitescu & Potra, 1996).
Revised model requirements • Velocity based Newton laws, by combining time stepping with impulse resolution. • Rigid bodies. • No inter penetration, nonnegative contact impulses and passive contact • Joint constraints • Coulomb friction or reasonable approximations. • Impact resolution (Poisson hypothesis).
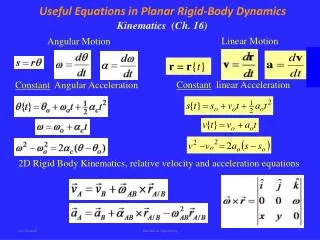
Insert Model Slides Framework and notations used • The rigid multi-body system is described by its generalized coordinates, q, and generalized velocities, v. • The contacts (joints) are described by inequalities (equalities). • The ``tangent plane'' for a contact constraint is defined by the cone generators • M: mass matrix, symmetric positive definite; h: the time step k: external force.
Contact configuration described by the (generalized) distance function , which allows for some interpenetration. Feasible set . Contact impulses are compressive The normal velocity for non inter penetration is velocity-based (as opposed to Stewart & Trinkle, where it is position-based): Complementarity guarantees energetic passivity of contact: Contact Model
is the normal impulse and is the tangential impulse is the total impulse in Newton Euler world coordinates . Classical Coulomb model requires the 3D contact impulse to lie in a circular cone. If relative motion exists, the frictional impulse has to be opposite to the relative velocity (Maximum Dissipation) Contact Description
Linear Complementarity Problems (LCPs) • Linear and Quadratic Programming are LCPs, via primal-dual formulations. • If , a solution exists, (by a Brouwer fixed point argument), and can be computed by Lemke’s algorithm (pivotal, similar to simplex). • M has to be copositive
Interior Point Algorithms (IP) • It takes corrected Newton steps to compute a solution if M is positive semi definite. The central path is well defined. • In the convex case IP algorithms have polynomial complexity, but other extensions are unclear.
Theorem • Consider the mixed LCP above. If M is a symmetric positive definite matrix, N a copositive matrix and b a nonnegative vector, then the mixed LCP has a solution. Lemke’s algorithm (with anti cycling strategy) will find a solution of the LCP obtained by eliminating x,y.
Properties of the formulation • The model is solvable for any configuration. • Discrete Maximum Dissipation Principle (MDP): The frictional impulse maximizes the dissipation over all feasible contact impulses, given • If the mass matrix is constant, the kinetic energy at the new step cannot exceed the the kinetic energy of the system with no constraint enforced (contacts are passive).
Energy/ stability properties • Assumption: M constant. • If the external force is of the form • c depends only on M and d. h has to be sufficiently small but depending only on c, T.
Constraint stability • There are constants C,H depending on the problem data, but not on the time-step h, such that • for any h < H (q(t) is obtained by linear interpolation).
Difficult Friction Configuration • For any friction coefficient we obtain multiple solutions. • Does this result in undesirable properties of the LCP matrix?
Properties of the LCP matrix. • The matrix Q is neither row, nor column sufficient. • As a result, it cannot be in the class, which makes it difficult to use polynomial-time interior-point algorithms. • Lemke’s algorithm appears to be the only one which is guaranteed to provide a solution to this model. • However, further analysis may reveal good matrix properties for pointed friction cones. • Since model needs to solve a succession of these LCPs anyway, other approaches may provide (computationally) better matrices.
Differential Inclusions • v has bounded variation • K(t) is closed and convex set valued
Theorem • For a pointed friction cone, there exists • The quantities are obtained by linear interpolation. (D. Stewart)
Theorem(II) • For one contact, maximal dissipation holds
Accomplishments • The time-stepping model to has a solution regardless of the configuration and dimension of the problem. Impulsive solutions are accommodated. • Static and dynamic friction are treated in an unitary manner. • The constraints are guaranteed to be satisfied within any given tolerance. • The numerical scheme is dissipative and, as a result the velocities are uniformly bounded. • A differential inclusion model with energy dissipation satisfied in the limit.
2-dimensional examples • Long bar with multiple contacts: • low friction (mu=0.05, e=0.6) • high friction.(mu=0.2, e=0.6) • 2 blocks on table • low friction (mu=0.01, e=0.2) • high friction (mu=0.1, e=0.2) • Multiple collisions with high restitution, high friction (mu=0.3, e=0.9). • Three blocks on table, low friction (mu=0.05, e=0.6). • Several blocks, (mu=0.2, e=1.0)
Open Problems • Can a consistent differential inclusion approach be formulated for general configurations? • Under which conditions does the maximum dissipation principle apply in the multiple contact case? • Can other properties of the time-stepping scheme be used in the continuous time context (such as the bound on the square of the variation of the velocities)? • Is the solution set of the friction LCP convex? (it is not true for arbitrary copositive matrices), • Can the LCP be recast as a convex optimization problem?
Future Research • Treat the Coulomb cone directly rather than using a polygonal approximation (partly solved APS98 ). • Design stable numerical algorithms to handle stiffness (implicit or linearly implicit, work in progress). • Nonlinear formulations (NCP). • Investigate Interior-Point Algorithms for solving the friction LCP or NCP. • Are higher-order methods relevant? • Formulate an efficient piecewise DAE strategy.