Download
1 / 33
330 likes | 427 Views
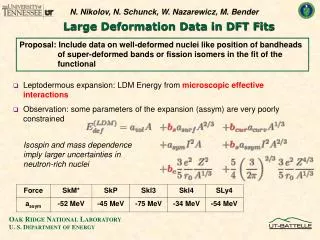
Building Prostate Statistical Atlas using Large-Deformation Image Registration. Eric Hui erichui@alumni.uwaterloo.ca University of Waterloo – MIAMI Bi-weekly Meeting March 31, 2003 at 10:30am in DC 2564. Outline. Motivation Overall Design Fluid Landmarks Resulting Prostate Statistical Atlas

E N D
Building Prostate Statistical Atlasusing Large-Deformation Image Registration Eric Huierichui@alumni.uwaterloo.ca University of Waterloo – MIAMI Bi-weekly MeetingMarch 31, 2003 at 10:30am in DC 2564
Outline • Motivation • Overall Design • Fluid Landmarks • Resulting Prostate Statistical Atlas • Conclusions • Questions
Motivation Ultrasound image of a prostate (from University of Western Ontario)
Motivation Outline of the prostate (by Dr. Downey)
Motivation Benign Prostatic Hyperplasia (BPH) Cancerous Benign Identified regions of the prostate (by Dr. Downey)
Motivation • Features: • Grey-level: dark vs. bright; • Texture: textured vs. homogeneous; • Spatial location w.r.t. the prostate.
Motivation • Regions closer to the anus has a higher probability of being cancerous.
Motivation (x,y) P(cancerous)=0.6 P(BPH) = 0.1 P(benign) = 0.3 • The idea is to build a statistical atlas. • The spatial location (x,y) is mapped to a probability of cancerous, BPH, or benign.
Motivation • Prostates come in different sizes and shapes!!! Image Registration
Overall Design Deform Sum over “cancerous” P(cancerous) Deform Sum over “BPH” P(BPH) Sum over “benign” Deform P(benign)
Large-Deformation usingFluid Landmarks • Simple affine transformations(e.g. rigid translation, rotation, scaling, shearing) • Intensity-based deformation • Small-deformation(e.g. thin-plate splines and linear-elastic models) • Large-Deformation using Fluid Landmarks
Large-Deformation usingFluid Landmarks • Lagrangian trajectory: • Matlab implementation: T=3 subject landmarks model landmarks Note that Matlab is one-based, so time starts at t=1.
Large-Deformation usingFluid Landmarks • The optimal Lagrangian trajectory can be computed as: • Using iterative gradient descent:
Distance Error D((x,t)) • The rate of change in distance error can be computed as:where is the a priorierror covariance, is the a priorimodel landmark location,
Quadratic Energy P((x,t)) • The rate of change in quadratic energy can be computed as:where can be thought as a measure of the distance between and .
Quadratic Energy P((x,t)) • Landmarks are moved “smoothly” because the velocity vectors of all other landmarks , weighted by a distance function , contribute to the quadratic energy. Consider landmark xn at t=2
Interpolate Velocity Vectors • Velocity vectors at any location can be interpolated by a weighted sum of the optimal velocity vectors of all landmarks.
Velocity Vectors at t=2 Magnitudes are normalized in this plot.
Velocity Vectors at t=3 Magnitudes are normalized in this plot.
Final Trajectories for All Points • Lagrangian trajectory: • Matlab implementation: T=3 subject landmarks model landmarks
Deformation Result deform • The intensity values between the discrete pixels of the original image are interpolated using triangle-based linear interpolation.
Recall: Overall Design Deform Sum over “cancerous” P(cancerous) Deform Sum over “BPH” P(BPH) Sum over “benign” Deform P(benign)
Resulting Prostate Statistical Atlas Cancerous Benign BPH Results based on 10 images.
Conclusions • Spatial location of a ROI can also be a useful feature in classification. • In order to build a prostate statistical atlas, each prostate must be deformed to a common shape (e.g. circle). • Large-deformation based on fluid landmarks can be used for such deformation.
Questions • How to define the landmarks? • e.g. equally spaced vs. curvature-based. • Is circle a good shape for the model? • e.g. circle vs. ellipse vs. “walnut” shape. • How to handle the imperfection of the result (i.e. not a perfect circle)? • e.g. more landmarks vs. additional class called “undefined”. • Further improvements or extensions? • e.g. dynamic knowledge base.
References • G.E. Christensen, P. Yin, M.W. Vannier, K.S.C. Chao, J.F. Dempsey, and J.F. Williamson, “Large-Deformation Image Registration using Fluid Landmarks”. • S.C. Joshi and M.I. Miller, “Landmark Matching via Large Deformation Diffeomorphisms”, IEEE Transactions on Image Processing, Vol. 9, No. 8, August 2000.