Download
1 / 25
250 likes | 390 Views
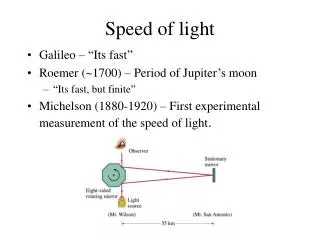
Regulation of Speed in Car Following. George J. Andersen Craig Sauer Asad Saidpour Department of Psychology University of California, Riverside. PATH Project MOU 4220. Utility of Human Driver Model. Warning Systems Autonomous/semi-autonomous Vehicle Control Traffic Flow Models. ROAD

E N D
Regulation of Speed in Car Following George J. Andersen Craig Sauer Asad Saidpour Department of Psychology University of California, Riverside PATH Project MOU 4220
Utility of Human Driver Model • Warning Systems • Autonomous/semi-autonomous Vehicle Control • Traffic Flow Models
ROAD ENVIRONMENT Strategic Perception Tactical Management and control Operational Execution Emergency Management
REACT – Collision Detection Model • Model based on analysis of visual information available to driver • Use of 5 parameters t dt/dt a da/dt ddiff
TopView FrontView t=0 t=1 q t=q/Dq t specifies the time to contact during constant velocity collisions
t =dt/dt dt/dt used during deceleration When dt/dt = -0.5 vehicle will reach zero velocity at obstacle
a is the position of object in visual field When a = 0 object is on a collision path Useful when path of motion is linear
da/dt is the change in position of object in visual field When da/dt approaches zero object is on a collision path Useful when path of motion is curvilinear
ddiff is comparison of two distance estimates: dv – distance vehicle will traverse before reaching zero velocity ds – distance of collision object ddiff = dv – ds dv = 1.5v2/a v = number of texture elements that pass position in visual field a = change in number of texture Elements that pass position in visual field ds = (s)tan-1 q s = size of object q = visual angle of object
Vehicle Motion No F/S V/S F/C V/C No F/S Object Motion V/S F/C V/C F = Fixed Speed V = Variable Speed S = Straight Path C = Curved Path
Select Object Derive a, d/dt (angular direction) Is a=0? Or d/dt0?(constant angular direction) Yes No Derive t Is t>0? (expansion)? Derive dv-ds Derive dt/dt Yes Is dt/dt =0? (Constant expansion) Is dv-ds =0? (Constant expansion) Yes Collision Object No No Is dt/dt >=-0.5? Yes Is dv-ds >0? No Non-collision Object
Limitations of REACT Parameters t, dt/dt, and ddiff only useful when a collision is impending a and da/dt only useful for recovering collision path information
Optical Information for Car Following • Information for specifying distance and change in distance • Information for specifying speed and change in speed
TopView t=0 t=1 q FrontView Dq associated with change in distance due to change in speed
Parameters of Car Following Model q0 • Initial visual angle on target vehicle q • Current visual angle dq/dt • Instantaneous change in visual angle k1, k2 • Constant determined by small or large velocity change
Derive q – q0, dq/dt - + Sign dq/dt Increasing Distance Decreasing Distance - - + + Sign q - q0 Sign q - q0 Too close Too close Too far Too far Small (k1) Acceleration Small (k1) Deceleration Large (k2) Acceleration Large (k2) Deceleration
Dq(t) Velocity change Velocity Scalar k = q(t) t How is change in speed determined?
Human Factors Experiments • Maintain distance behind target vehicle that varied speed - sine function - ramp function
GAIN PHASE Frequency Frequency Amplitude Amplitude 0.0513 0.0513 0.1111 0.1111 CAR ONLY CAR ONLY 5 k/h 5 k/h 1.701 -20.088 -62.28 2.039 15 k/h 15 k/h -24.936 1.435 -68.964 1.230 25 k/h 25 k/h -24.491 1.373 0.982 -67.776 CAR WITH SCENE CAR WITH SCENE 5 k/h 5 k/h -24.795 1.426 1.755 -72.356 15 k/h 15 k/h -26.585 1.075 -67.248 0.961 25 k/h 25 k/h -28.228 0.982 0.793 -63.183
Conclusions • Presented a model of car following • Based on visual angle information of target vehicle • Performance of model good fit to performance of drivers in car following study • Examining role of speed information from surrounding scene