Electric Motor Basic Principles
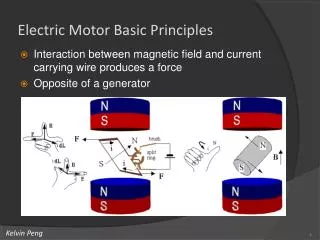
Electric Motor Basic Principles. Interaction between magnetic field and current carrying wire produces a force Opposite of a generator. Kelvin Peng. Conventional (Brushed) DC Motors. Permanent magnets for outer stator Rotating coils for inner rotor

Electric Motor Basic Principles
E N D
Presentation Transcript
Electric Motor Basic Principles • Interaction between magnetic field and current carrying wire produces a force • Opposite of a generator Kelvin Peng
Conventional (Brushed) DC Motors • Permanent magnets for outer stator • Rotating coils for inner rotor • Commutation performed with metal contact brushes and contacts designed to reverse the polarity of the rotor as it reaches horizontal Kelvin Peng
2 pole brushed DC motor commutation Kelvin Peng
DC Motor considerations • Back EMF - every motor is also a generator • More current = more torque; more voltage = more speed • Load, torque, speed characteristics • Shunt-wound, series-wound (aka universal motor), compound DC motors Kelvin Peng
Conventional (Brushed) DC Motors • Common Applications: • Small/cheap devices such as toys, electric tooth brushes, small drills • Lab 3 • Pros: • Cheap, simple • Easy to control - speed is governed by the voltage and torque by the current through the armature • Cons: • Mechanical brushes - electrical noise, arcing, sparking, friction, wear, inefficient, shorting Kelvin Peng
Brushless DC Motors • Essential difference - commutation is performed electronically with controller rather than mechanically with brushes Kelvin Peng
Brushless DC Motor Commutation • Commutation is performed electronically using a controller (e.g. HCS12 or logic circuit) • Similarity with stepper motor, but with less # poles • Needs rotor positional closed loop feedback: hall effect sensors, back EMF, photo transistors Kelvin Peng
Brushless DC Motors • Applications • CPU cooling fans • CD/DVD Players • Electric automobiles • Pros (compared to brushed DC) • Higher efficiency • Longer lifespan, low maintenance • Clean, fast, no sparking/issues with brushed contacts • Cons • Higher cost • More complex circuitry and requires a controller Kelvin Peng
AC Motors • Synchronous and Induction (Asynchronous) • Synchronous: rotor rotation frequency = AC current frequency Kelvin Peng
AC Induction Motors (3 Phase) • Use poly-phase (usually 3) AC current to create a rotating magnetic field on the stator • This induces a magnetic field on the rotor, which tries to follow stator - slipping required to produce torque • Workhorses of the industry - high powered applications Kelvin Peng
Stepper Motors Jiasheng He
Stepper Motor Characteristics Brushless Incremental steps/changes Holding Torque at zero speed Speed increase -> torque decreases Usually open loop Jiasheng He
Stepper Speed Characteristics • Torque varies inversely with speed • Current is proportional to torque • Torque →∞ means Current →∞, which leads to motor damage • Torque thus needs to be limited to rated value of motor Jiasheng He
Types of Stepper Motors Permanent Magnet Variable Reluctance Hybrid Synchronous Jiasheng He
Permanent Magnet Stepper Motor • Rotor has permanent magnets • The teeth on the rotor and stator are offset • Number of teeth determine step angle • Holding, Residual Torques Jiasheng He
Unipolar • Two coils, each with a center tap • Center tap is connected to positive supply • Ends of each coil are alternately grounded • Low Torque Jiasheng He
Bipolar • Two coils, no center taps • Able to reverse polarity of current across coils • Higher Torque than Unipolar Jiasheng He
Bipolar • More complex control and drive circuit • Coils are connected to an H-Bridge circuit • Voltage applied across load in either direction • H-Bridge required for each coil Jiasheng He
Variable Reluctance • No permanent magnet – soft iron cylinder • Less rotor teeth than stator pole pairs • Rotor teeth align with energized stator coils Jiasheng He
Variable Reluctance • Magnetic flux seeks lowest reluctance path through magnetic circuit • Stator coils energized in groups called Phases Jiasheng He
Hybrid Synchronous • Combines both permanent magnet and variable reluctance features • Smaller step angle than permanent magnet and variable reluctance Jiasheng He
Applications • Printers • Floppy disk drives • Laser Cutting • Milling Machines • Typewriters • Assembly Lines Jiasheng He