0 Recordatorio
0 Recordatorio. Cálculo matricial de estructuras Guillermo Rus Carlborg. Índice. Álgebra matricial Definición Operaciones (+ – × ÷) Elasticidad Desplazamientos + deformaciones Tensiones + Esfuerzos Relaciones constitutivas. Álgebra matricial – Definición de matriz.

0 Recordatorio
E N D
Presentation Transcript
0Recordatorio Cálculo matricial de estructuras Guillermo Rus Carlborg
Índice • Álgebra matricial • Definición • Operaciones (+ – × ÷) • Elasticidad • Desplazamientos + deformaciones • Tensiones + Esfuerzos • Relaciones constitutivas Guillermo Rus Carlborg
Álgebra matricial – Definición de matriz • Un sistema de ecuaciones lineal se puede representar: términos independientes variables coeficientes Matriz: negrita mayúscula Vector: negrita minúscula Guillermo Rus Carlborg
Álgebra matricial – Definición de matriz • Algunos casos particulares de matriz A tienen nombre: • Traspuesta • Cuadrada • Simétrica • Identidad Guillermo Rus Carlborg
Álgebra matricial – Operaciones Multiplicación: • Propiedades: • Conmutativa NO • Asociativa • Distributiva • Identidad • Transposición Guillermo Rus Carlborg
Álgebra matricial – Operaciones Suma y resta: Determinante: término a término submatriz: eliminando fila 1, columna i Guillermo Rus Carlborg
Álgebra matricial – Operaciones Inversa: • Condiciones: • Propiedades: Guillermo Rus Carlborg
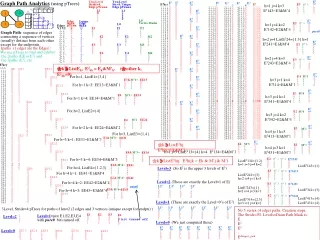
Álgebra matricial – Operaciones Inversa: • Para resolver los métodos modernos no calculan • Métodos directos: tiempo~N3 • Eliminación de Gauss: • Descomposición LU: • Descomposición QR: • Métodos iterativos: tiempo~N2 • Jacobi: • Gauss-Seidel: • Gradiente conjugado: GMRes: de los mejores algoritmos Guillermo Rus Carlborg
Elasticidad – Desplazamiento y deformación Vectores unitarios • Posición: • Desplazamiento: • Movimiento: Variables Lagrangianas Variables Eulerianas Guillermo Rus Carlborg
Elasticidad – Desplazamiento y deformación • Distancia: • Pequeños desplazamientos: Tensor de deformación de Lagrange Guillermo Rus Carlborg
Elasticidad – Tensión y tracción • La cinética de los sólidos se describe por fuerzas continuos tensiones Para conocer las tensiones en un punto interior, cortamos por punto + dirección n Resultante que compensa lo eliminado tracción Guillermo Rus Carlborg
Elasticidad – Tensión y tracción • Definimos como estado tensional en un punto lo necesario para conocer la tracción en cualquier dirección n • Para un plano no canónico: tensión Definido por n Sumatorio de Einstein Guillermo Rus Carlborg
Elasticidad – Relaciones constitutivas • Al igual que en 1D: ahora: • Suponiendo elasticidad lineal isótropa: 2 constantes Lamé Hooke Guillermo Rus Carlborg
Elasticidad – Barra • Elemento barra a flexión de Euler-Bernoulli: • Hipótesis: H1: Sección transversal plana H2: Sección inextensible H3: Sección perpendicular • Deformación: • Comportamiento: Guillermo Rus Carlborg
Elasticidad – Barra • Elemento barra a flexión de Euler-Bernoulli: • El comportamiento longitudinal está desacoplado del transversal: Equilibrio longitudinal: Equilibrio Transversal: Guillermo Rus Carlborg