Download
1 / 20
210 likes | 380 Views
Chris Kaffine Second Annual MIT PRIMES Conference, May 20 th , 2012. Comparing NARF and SIFT Key Point Extraction Algorithms. Range Sensors. Purpose: collect distance information Advantage over cameras: 3D Methods: Stereo Imagery LiDAR Structured Light. Representing Range Data.

E N D
Chris Kaffine Second Annual MIT PRIMES Conference, May 20th, 2012 Comparing NARF and SIFT Key Point Extraction Algorithms
Range Sensors • Purpose: collect distance information • Advantage over cameras: 3D • Methods: • Stereo Imagery • LiDAR • Structured Light
Representing Range Data • Point Clouds: • 3D-coordinates • Geometrically understandable • Range Images: • 2D-image with pixel values representing depth • Similar to sensor functioning • Allows border extraction
Correspondences • Goal: Find points in two images which are equivalent • With matched points, differences between images can be calculated
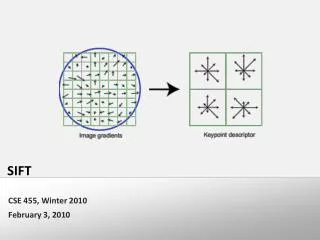
Key Points and Descriptors • Find correspondences in two steps: find key points, calculate descriptors • Key Points- Distinguishable, stable locations in a scene • Descriptors- Numerical description of a point and its underlying surface • Points with similar descriptors are correspondences
NARF • Normally Aligned Radial Features • Uses range images • Uses borders and change in distance (pixel) values to identify key points • Key points are invariant to scale, susceptible to camera orientation • Support Size: indicates how detailed the search should be
SIFT • Scale Invariant Feature Transform • Uses point clouds • Finds key points that are invariant to scale • Utilizes full, 3D geometry • Scale Size: indicates how close to “zoom in”
Evaluating the Algorithms • Use data with known sensor location • Within chronologically adjacent frames, search for nearby key points • Points within a certain distance are considered true matches • Count number of frames each point lasts for • Repeat, using different algorithms with different parameter values and different distance thresholds
Evaluating the Algorithms • Metrics for evaluation: • Number of key points identified • Persistence/Stability of key points • Density of key points, with relation to distance threshold • Due to limitations in persistence algorithm, two persistence metrics were used: • Measure 1:Average persistence of all key points • Measure 2: Number of key points with persistence greater than 1
Results- Measures of Success • Measure 1: Smoother, NARF exceeds SIFT in parts • Overall, similar trends, though distinct metrics
Results- Measures of Success • Measure 1: Smoother, NARF exceeds SIFT in parts • Overall, similar trends so overestimation most likely did not have a strong effect
Results- Measures of Success • At low parameter values, SIFT key point numbers and density rise dramatically, NARF values rise steadily • Indicates that as parameter values decrease, superfluous key points are detected
Results • Best parameter values for each algorithm displayed • Metric used: #key points * persistence / density • SIFT almost always superior • Scale size .07 better in general, 0.1 possibly better in some cases
Acknowledgements • MIT PRIMES • Professor Seth Teller • Jon Brookshire – Mentor